



















Marsbot火星车入门教程-连线图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Marsbot火星车入门教程-连线图
说明:
- 介绍Marsbot硬件之间如何固定和连线
相关设备:
- 火星车marsbot套件,采购地址
硬件布局:
- 车体分上中下三个部分
- 上部:激光雷达
- 中部:Arduino Mega 2560,Nano开发板,电压转换器,IMU,12000ma电池,舵机驱动板Lewansoul BusLinker等
- 下部:车体核心,舵机LX-16A等
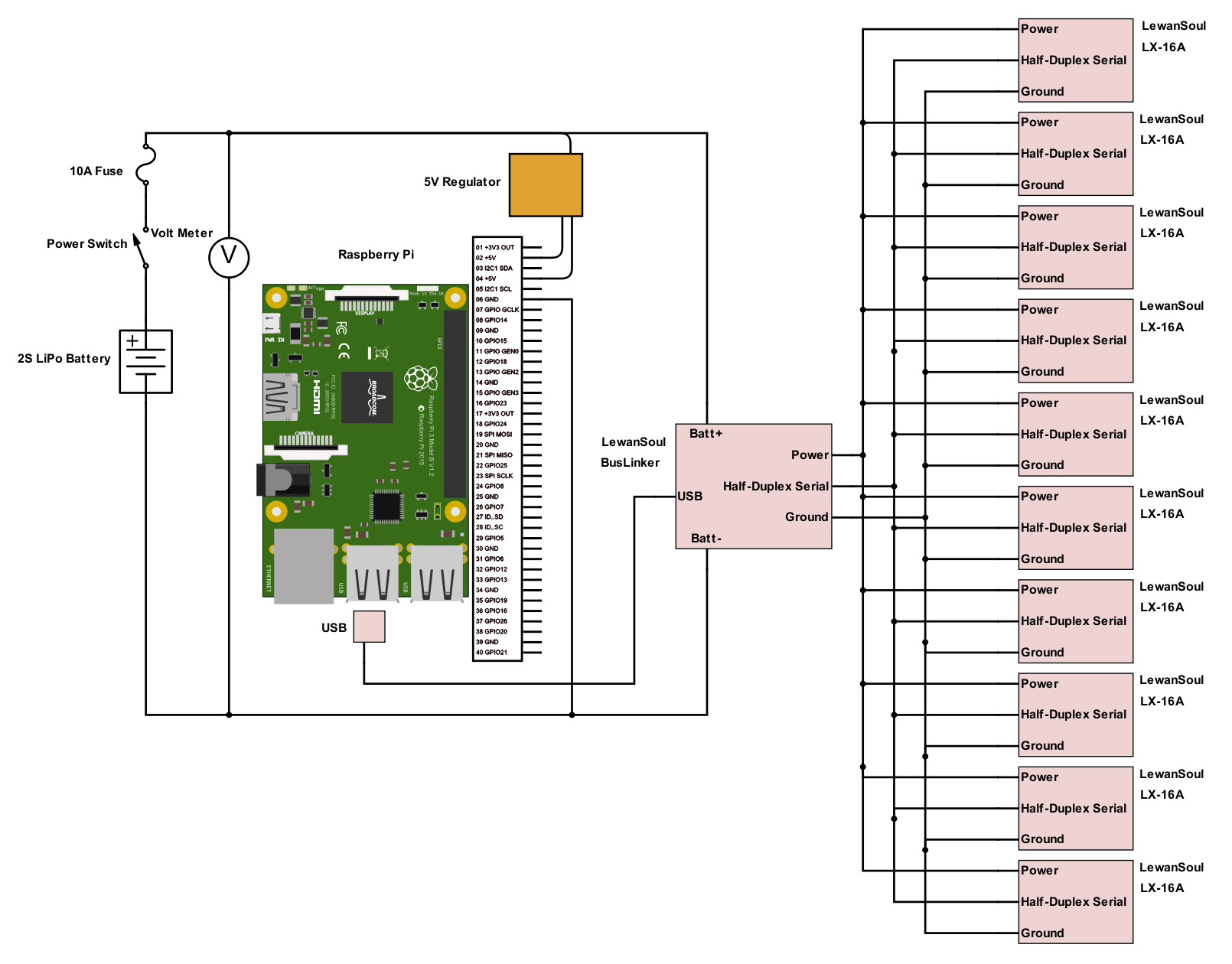
连线:
-
雷达->usb hub
-
Arduino Mega 2560 与 舵机驱动板Lewansoul BusLinker的连线:
RX - TX
TX - RX
5V - 5V
GND - GND-
电池->电压转换器(输出5V)->Nano开发板
-
电池->电压转换器(输出7.4V)->舵机驱动板->Arduino Mega 2560->舵机LX-16A
-
舵机之间相互连线
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号