



















Marsbot火星车入门教程-控制-网页控制(在树莓派使用)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Marsbot火星车入门教程-控制-网页控制
说明:
-
在树莓派使用
-
介绍如何利用marsbot进行网页控制
相关设备:
- 火星车marsbot套件,采购地址
步骤:
- 进入目录
$ cd AiMarsBot- 设置环境变量
$ export FLASK_APP=SGVHAK_Rover
$ export FLASK_DEBUG=1- 激活虚拟环境
$ . venv/bin/activate- 启动Flask
$ flask run --host=192.168.0.110- 通过Web浏览器打开
http://192.168.0.110:5000
- 通过环形摇杆控制移动
- 在网页上,点击 DRIVE VIA POLAR (ROUND)PAD,进入控制界面
- 通过移动摇杆驱动小车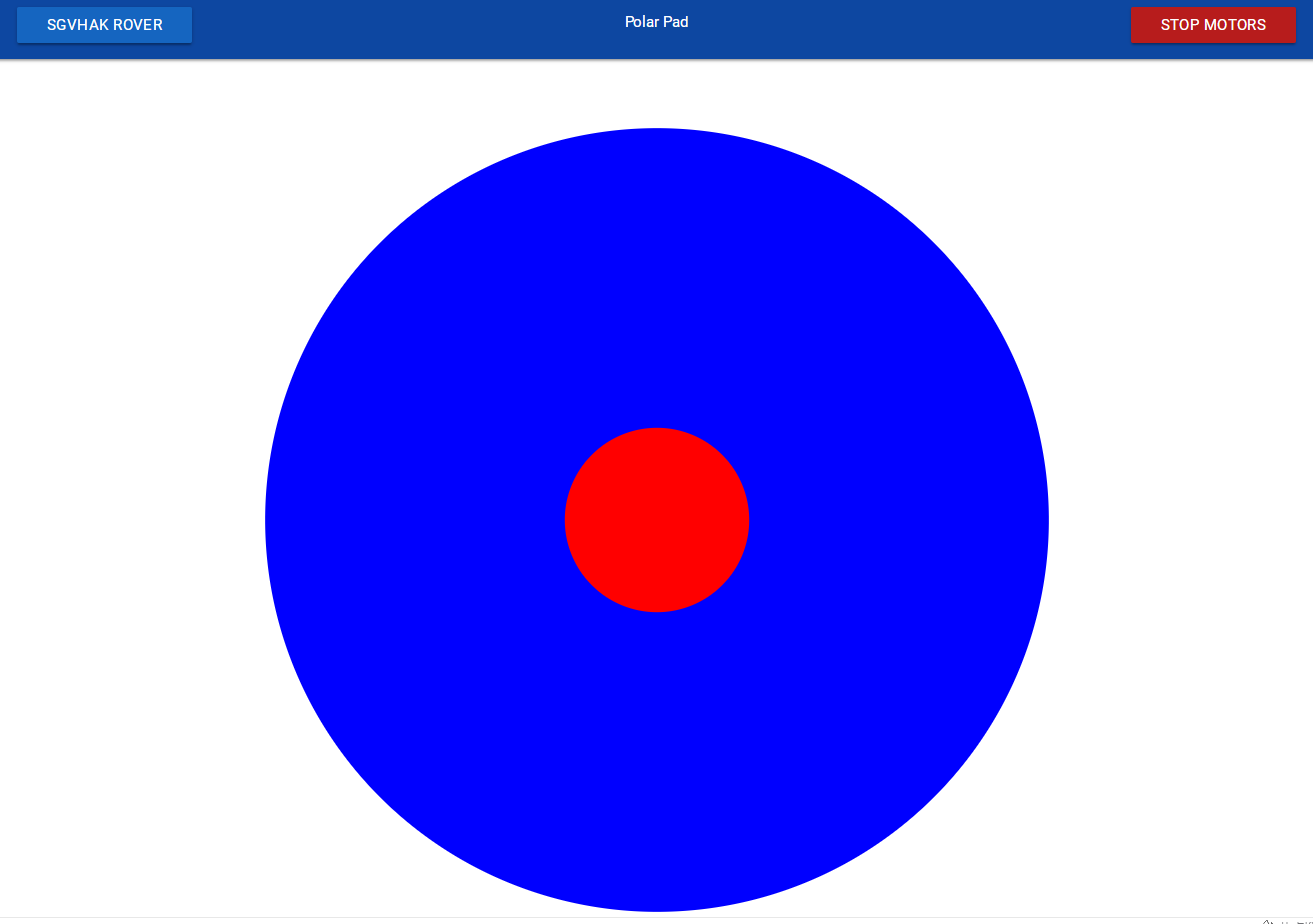
- 通过矩形摇杆控制移动
- 在网页上,点击 DRIVE VIA CARTESIAN RECTANGULAR PAD,进入控制界面
- 通过移动摇杆驱动小车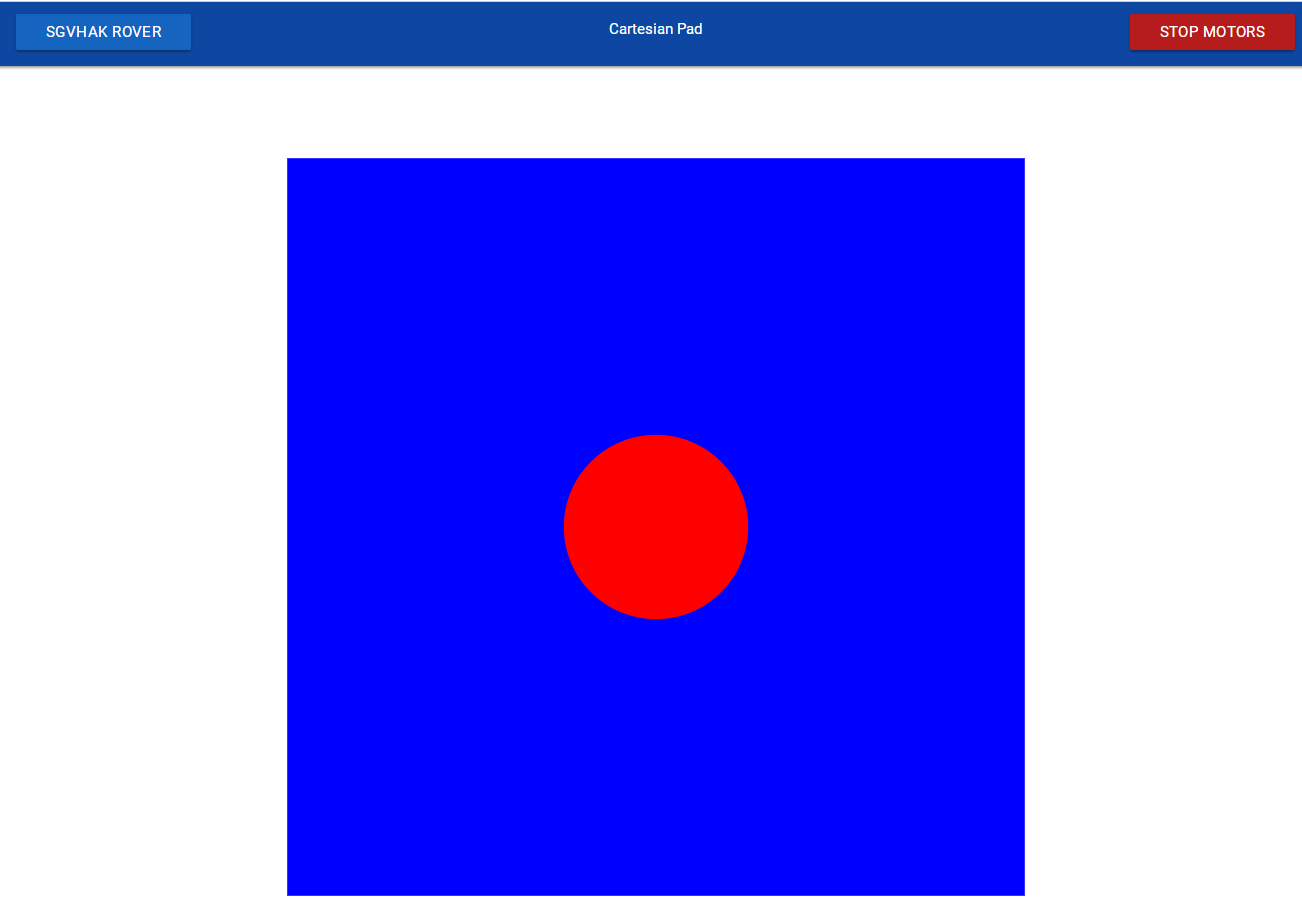
- 通过发出具体的速度和转向,控制移动
- 在网页上,点击 DRIVE BY ANGLE/VELOCITY COMMAND ,进入控制界面
- 通过拖拽进条发出具体的速度和转向,来驱动小车
- 查看底盘配置
- 在网页上,点击 CHASSIS COMFIGURATON,进入控制界面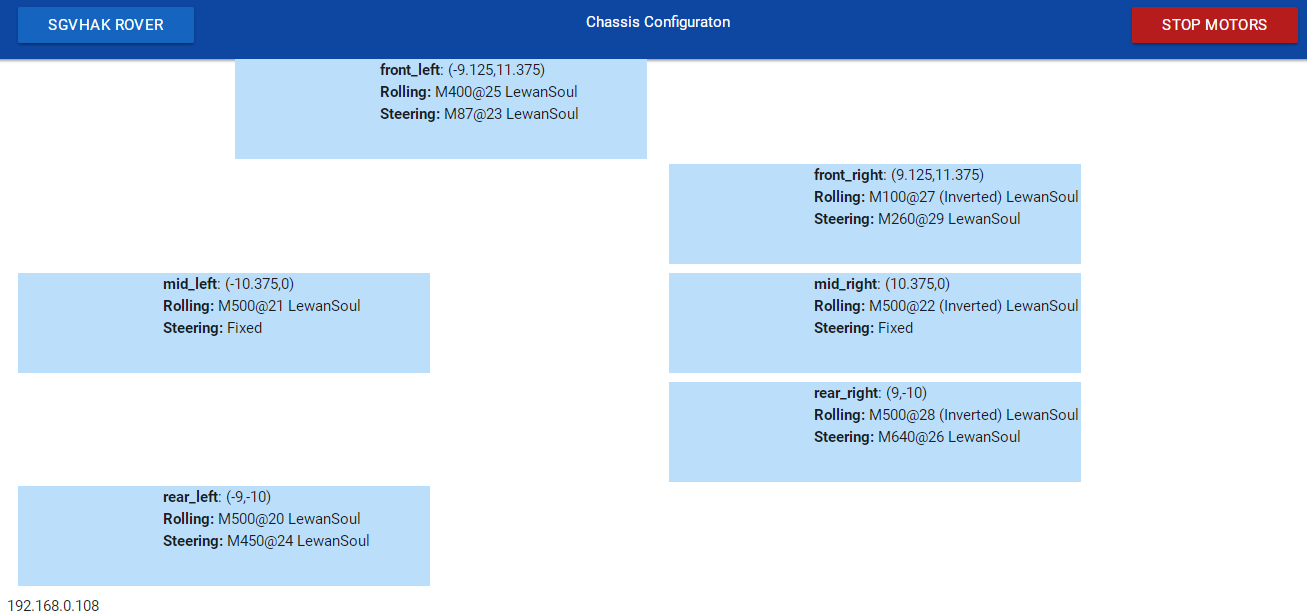
- 调整偏移角度
- 在网页上,点击 STEERING TRIM,进入控制界面
- 通过调整偏移角度来校准小车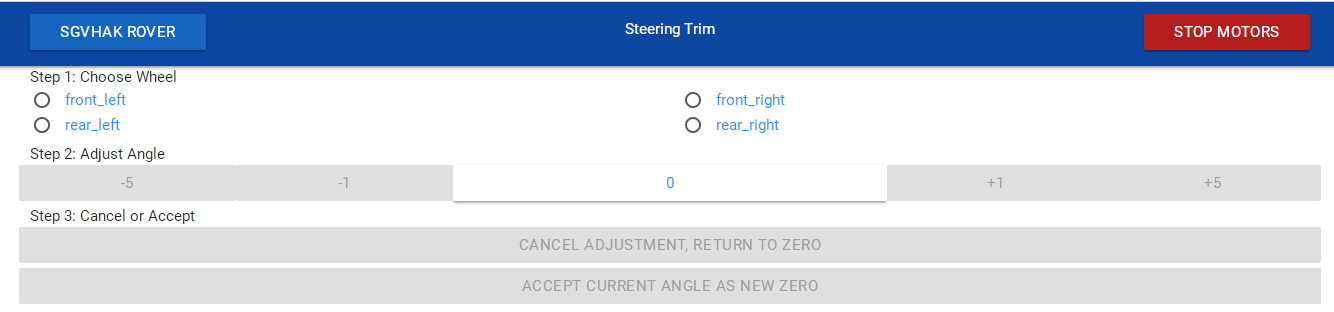
- 查看输入的电压
- 在网页上,点击 MOTOR INPUT VOLTAGES,进入控制界面
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号