



















Crazyflie入门教程-应用-使用Z-ranger卡座
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
Z游侠甲板包含一个VL53L0x飞行时间(ToF)激光测距传感器,并具有1线内存,使Crazyflie能够自动检测Z游侠甲板
-
该传感器可以测量从Crazyflie到地面的最远2米的距离
-
甲板只能安装在Crazyflie的底部
-
为了能够使用Z-ranger卡座,您需要将Crazyflie更新为最新固件
相关设备:
- crazyflie套件:采购地址
步骤:
-
要使用Z-Ranger平台,您需要使用Python客户端并与Crazyflie建立连接
-
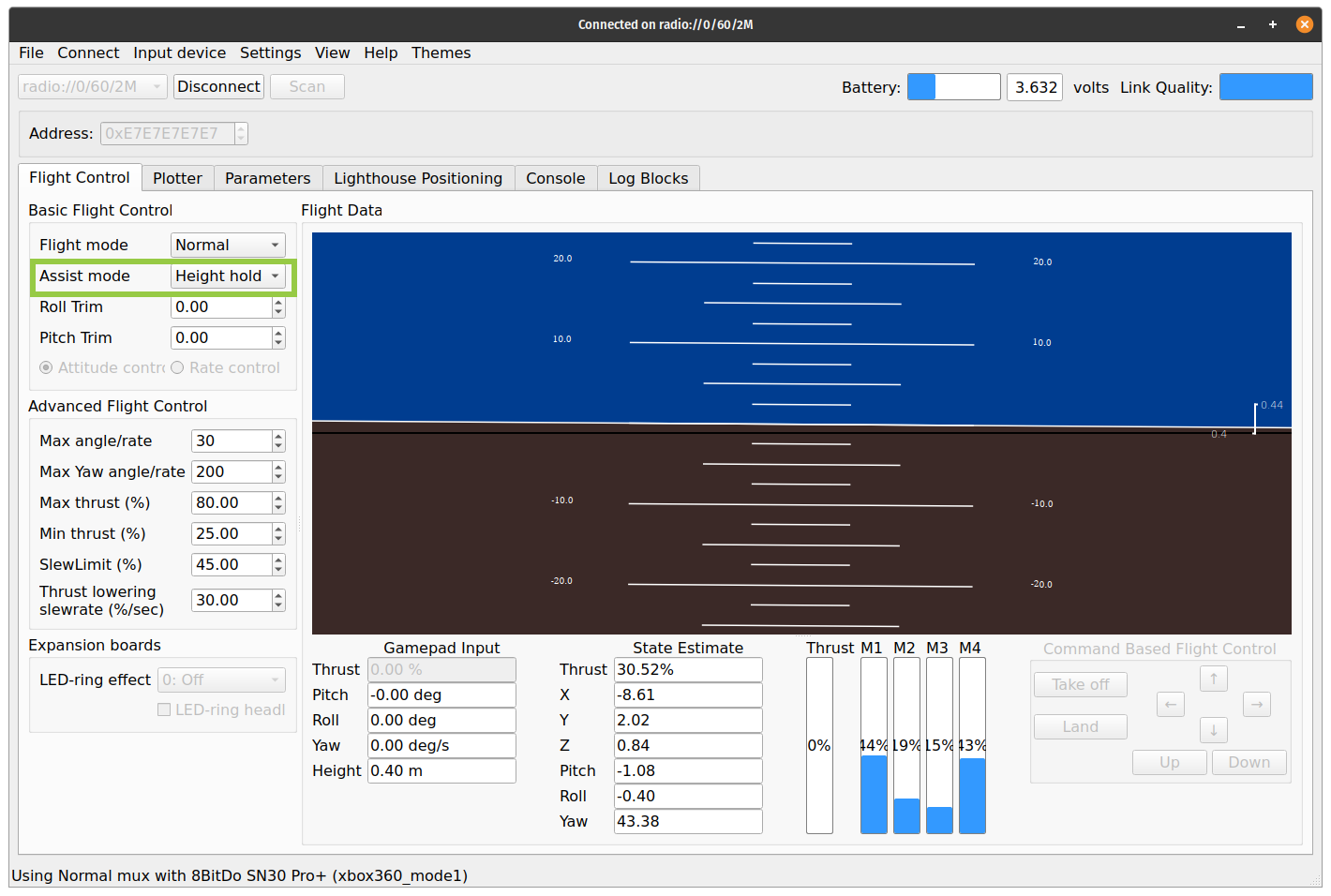
在客户端中,进入“协助”模式,然后在下拉菜单中选择“高度保持”模式。还要确保配置了辅助模式按钮
-
将Crazyflie 2.X放在地板上有足够地面空间可飞的区域中,然后按游戏手柄上的辅助模式按钮以激活高度保持模式。Crazyflie现在将起飞并悬停在40厘米的高度
-
要控制Crazyflie,请像往常一样使用滚动/俯仰,并使用推力更改高度保持设定点。松开高度保持按钮将取消激活该模式,并且推力输入将正常工作(即,您必须提供推力以使Crazyflie不会掉落)
-
每次重新激活高度保持模式时,设定点都会重置为40厘米
-
用户界面指南。以下是用户界面的简短说明

1.设定点高度(以米为单位) 2.高度误差(以米为单位)。即设定点和测量高度之间的差异。 3.设定点高度(以米为单位) 4.实测高度(米)
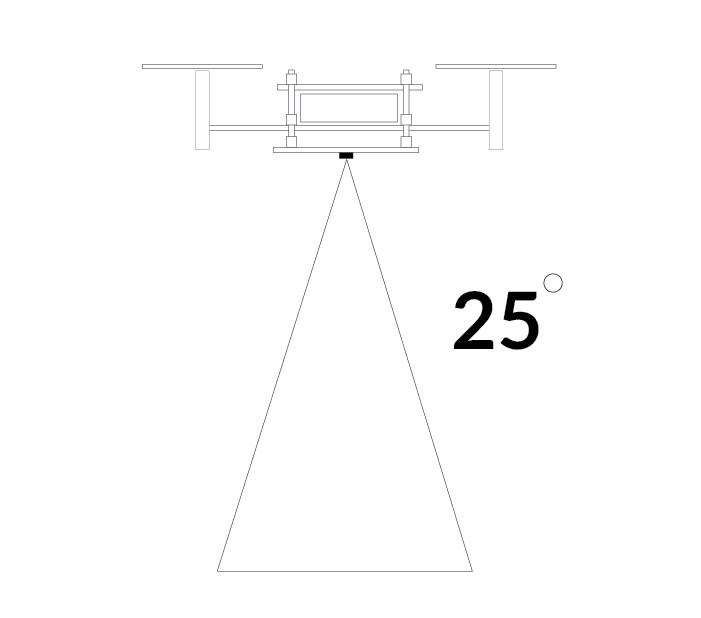
- 当传感器测量到地面的距离时,它将不会使用任何一点。取而代之的是,检测将使用圆锥体(见下文),传感器将报告最近的检测结果。这意味着Crazyflie越高,检测范围就越大。例如,如果Crazyflie靠近墙壁,则可能会出现问题,然后它将报告到墙壁而不是地板的距离
- 使用Z范围和高度保持模式的飞行视频
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号