



















crazyflie入门教程-启动rviz和查看TF
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍crazyflie无人机在crazyswarm2包中如何启动rviz,如何查看TF
相关设备:
- crazyflie套件:采购地址
步骤:
- 在 crazyflie.yaml 中,确保添加以下内容
all:
...
firmware_logging:
enabled: true
default_topics:
pose:
frequency: 10 # Hz- 启动crazyflie
ros2 launch crazyflie launch.py backend:=cflib- 启动rviz2
rviz2
-
将fixed frame的值修改为map
-
添加TF,点击Show Names,显示TF的名称
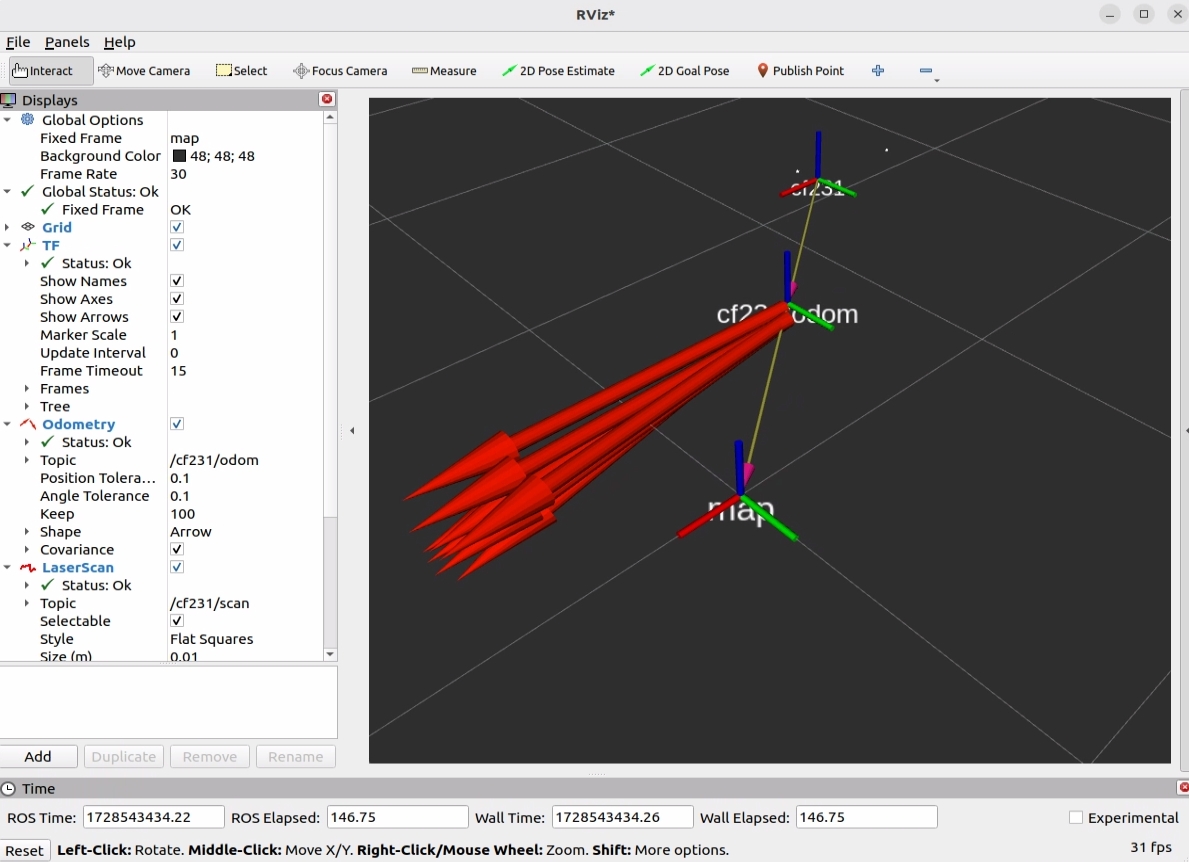
-
在rviz2中,添加里程计话题: ‘/cf231/pose/’
-
在rviz2中,添加雷达话题:‘/cf231/scan’
-
在rviz2中,添加位置话题: ‘/cf231/pose/’
-
查看tf
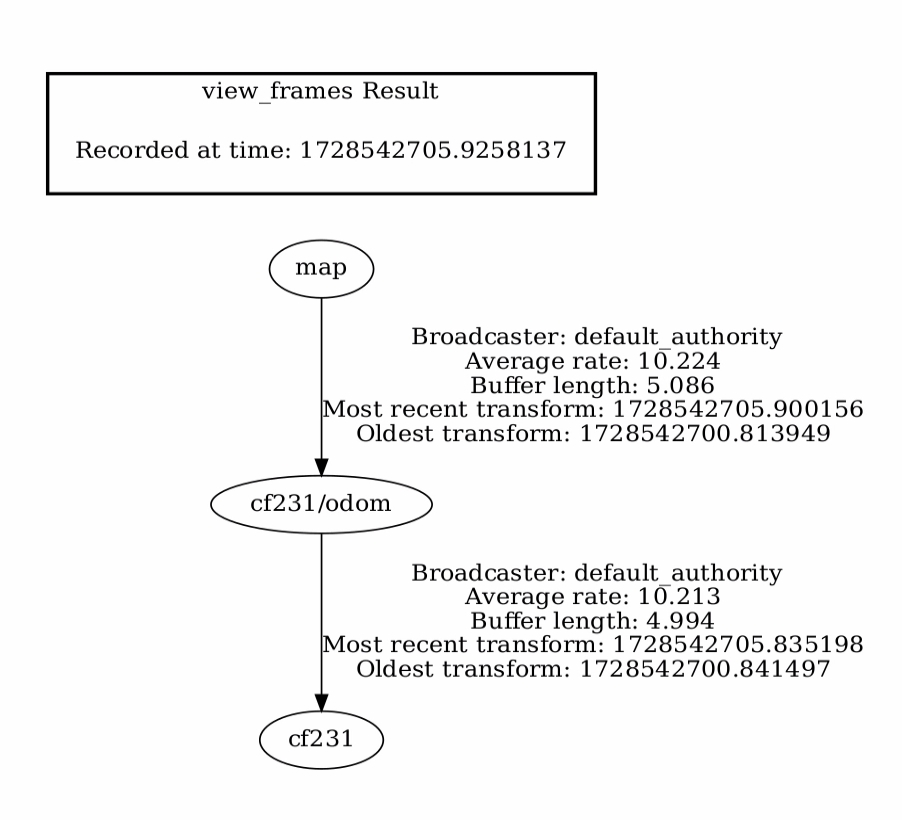
ros2 run tf2_tools view_frames- 保存TF树的PDF在当前目录下,名为frames.pdf,打开PDF
evince frames.pdf- 效果图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113282094532231&bvid=BV1Ek2GYdEVv&cid=26226527922&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号