



















Ignition入门教程-利用SDF构建机器人
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Ignition入门教程-利用SDF构建机器人
说明:
- 我们将学习如何在 SDFormat 中构建我们自己的机器人。
- 我们将构建一个简单的两轮机器人。
SDFormat
-
SDFormat(Simulation Description Format),有时缩写为 SDF,是一种 XML 格式,用于描述机器人模拟器、可视化和控制的对象和环境。 SDFormat 最初是作为 Gazebo 机器人模拟器的一部分开发的,其设计时考虑了科学机器人应用。 多年来,SDFormat 已经成为一种稳定、健壮和可扩展的格式,能够描述机器人、静态和动态对象、光照、地形甚至物理的各个方面。
-
您可以使用 SDFormat 准确地描述机器人的各个方面,无论机器人是带轮子的简单底盘还是人形机器人。 除了运动学和动态属性之外,还可以为机器人定义传感器、表面属性、纹理、关节摩擦以及更多属性。 这些功能允许您使用 SDFormat 进行仿真、可视化、运动规划和机器人控制。
-
仿真需要模型存在和交互的丰富而复杂的环境。 SDFormat 提供了定义各种环境的方法。 环境、地形(虚构或基于 DEM)、OpenStreetMaps 中的街道以及 The Prop Shop 提供的任何模型(在 3D 模型的在线存储库上)中可能包含多个灯光。
构建世界
- 我们将从构建一个简单的世界开始,然后在其中构建我们的机器人。
- 打开一个新文件,命名为building_robot.sdf,并将以下代码复制到其中。
<?xml version="1.0" ?>
<sdf version="1.7">
<world name="car_world">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="libignition-gazebo-physics-system.so"
name="ignition::gazebo::systems::Physics">
</plugin>
<plugin
filename="libignition-gazebo-user-commands-system.so"
name="ignition::gazebo::systems::UserCommands">
</plugin>
<plugin
filename="libignition-gazebo-scene-broadcaster-system.so"
name="ignition::gazebo::systems::SceneBroadcaster">
</plugin>
<gui fullscreen="0">
<!-- 3D scene -->
<plugin filename="GzScene3D" name="3D View">
<ignition-gui>
<title>3D View</title>
<property type="bool" key="showTitleBar">false</property>
<property type="string" key="state">docked</property>
</ignition-gui>
<engine>ogre2</engine>
<scene>scene</scene>
<ambient_light>0.4 0.4 0.4</ambient_light>
<background_color>0.8 0.8 0.8</background_color>
</plugin>
<!-- World control -->
<plugin filename="WorldControl" name="World control">
<ignition-gui>
<title>World control</title>
<property type="bool" key="showTitleBar">false</property>
<property type="bool" key="resizable">false</property>
<property type="double" key="height">72</property>
<property type="double" key="width">121</property>
<property type="double" key="z">1</property>
<property type="string" key="state">floating</property>
<anchors target="3D View">
<line own="left" target="left"/>
<line own="bottom" target="bottom"/>
</anchors>
</ignition-gui>
<play_pause>true</play_pause>
<step>true</step>
<start_paused>true</start_paused>
<service>/world/car_world/control</service>
<stats_topic>/world/car_world/stats</stats_topic>
</plugin>
<!-- World statistics -->
<plugin filename="WorldStats" name="World stats">
<ignition-gui>
<title>World stats</title>
<property type="bool" key="showTitleBar">false</property>
<property type="bool" key="resizable">false</property>
<property type="double" key="height">110</property>
<property type="double" key="width">290</property>
<property type="double" key="z">1</property>
<property type="string" key="state">floating</property>
<anchors target="3D View">
<line own="right" target="right"/>
<line own="bottom" target="bottom"/>
</anchors>
</ignition-gui>
<sim_time>true</sim_time>
<real_time>true</real_time>
<real_time_factor>true</real_time_factor>
<iterations>true</iterations>
<topic>/world/car_world/stats</topic>
</plugin>
<!-- Entity tree -->
<plugin filename="EntityTree" name="Entity tree">
</plugin>
</gui>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
</world>
</sdf>- 启动Ignition并指定文件
ign gazebo building_robot.sdf- 效果图
创建模型
- 在 标签下,我们将添加我们的机器人模型,如下所示:
定义模型
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose>-
这里我们定义了我们的模型vehicle_blue的名称,同级别的其他标签或模型中唯一的名称。 每个模型可能有一个指定为 canonical_link 的链接,模型的隐式框架附加到此链接。 如果未定义,第一个 将被选为规范链接。
-
标签用于定义模型的位置和方向,relative_to 属性用于定义模型相对于任何其他帧的位姿。 如果未定义 relative_to,则模型的 将相对于世界。 -
让我们的姿势相对于世界。 位姿标签内的值如下:
X Y Z R P Y ,其中X Y Z代表帧的位置,R P Y代表roll pitch yaw的方向。 我们将它们设置为零,这使得两个框架(模型和世界)相同。
链接形成我们的机器人
- 每个模型都是通过joints连接在一起的一组links (可以只是一个links )。
主体
- 底盘结构/chassis
<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>-
我们定义了第一个link ,我们的底盘和它相对于模型的姿势
-
惯性特性/Inertial properties
<inertial> <!--inertial properties of the link mass, inertia matix-->
<mass>1.14395</mass>
<inertia>
<ixx>0.095329</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.381317</iyy>
<iyz>0</iyz>
<izz>0.476646</izz>
</inertia>
</inertial>- 在这里,我们定义了底盘的惯性属性,例如mass 和
矩阵。 - 可以使用质量惯性计算器计算原始形状的惯性矩阵值。
- 视觉/Visual
<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
<!--let's add color to our link-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>-
顾名思义,
标签负责我们的链接的外观。 -
我们将
标签内的链接形状定义为 (长方体),然后在 标签内指定此框的三个维度(以米为单位)。 -
然后,在
标签内,我们定义了链接的材质。 在这里,我们将 、 和 颜色定义为一组 red/green/blue/alpha 四个数字,每个数字都在 [0, 1] 范围内。 -
碰撞/collision
<collision name='collision'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
</link>
</model>-
标签定义了链接的碰撞属性,我们的链接将如何与其他对象反应以及物理引擎对其的影响。 -
注意:
可以与视觉属性不同,例如,通常使用更简单的碰撞模型来减少计算时间。 -
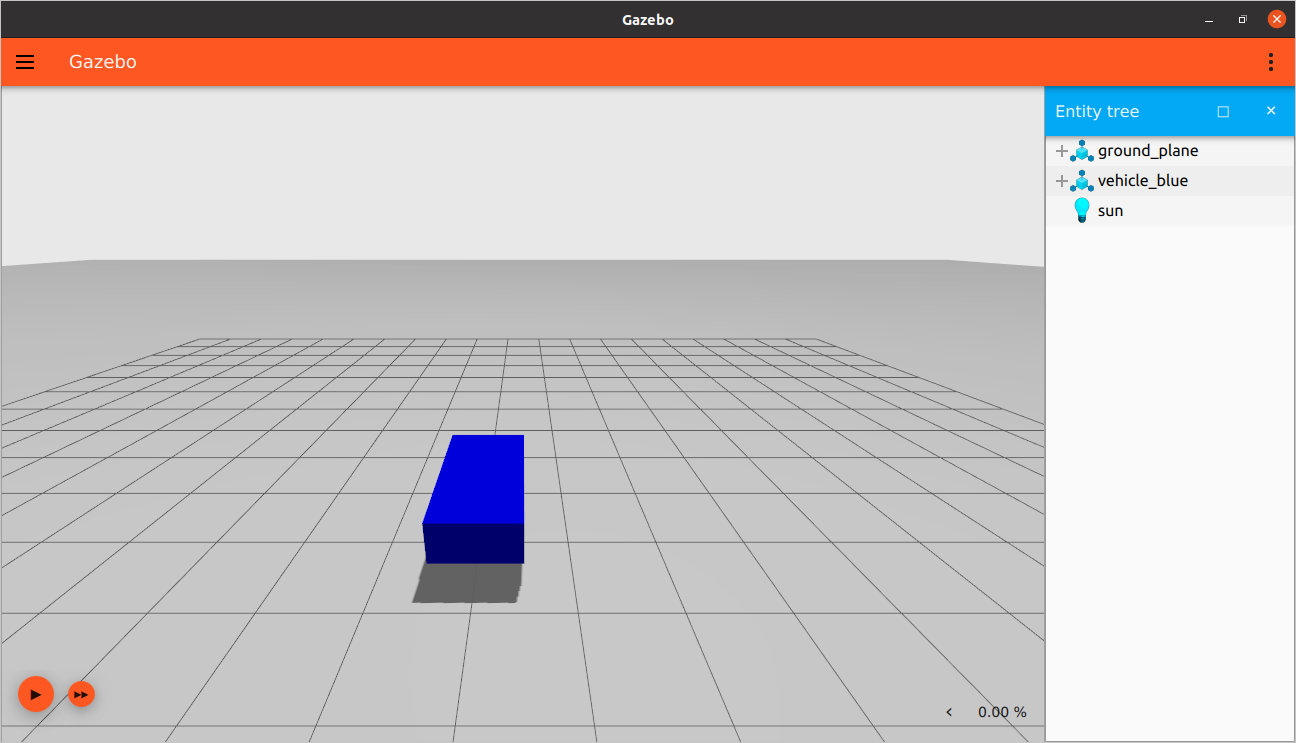
将上述所有部分按顺序复制到世界文件中后,再次运行世界:
ign gazebo building_robot.sdf- 效果图
- 在右上角单击插件下拉列表(垂直省略号),选择变换控件,选择您的模型,然后单击Transform control。
- 您应该看到三个轴,如下所示:
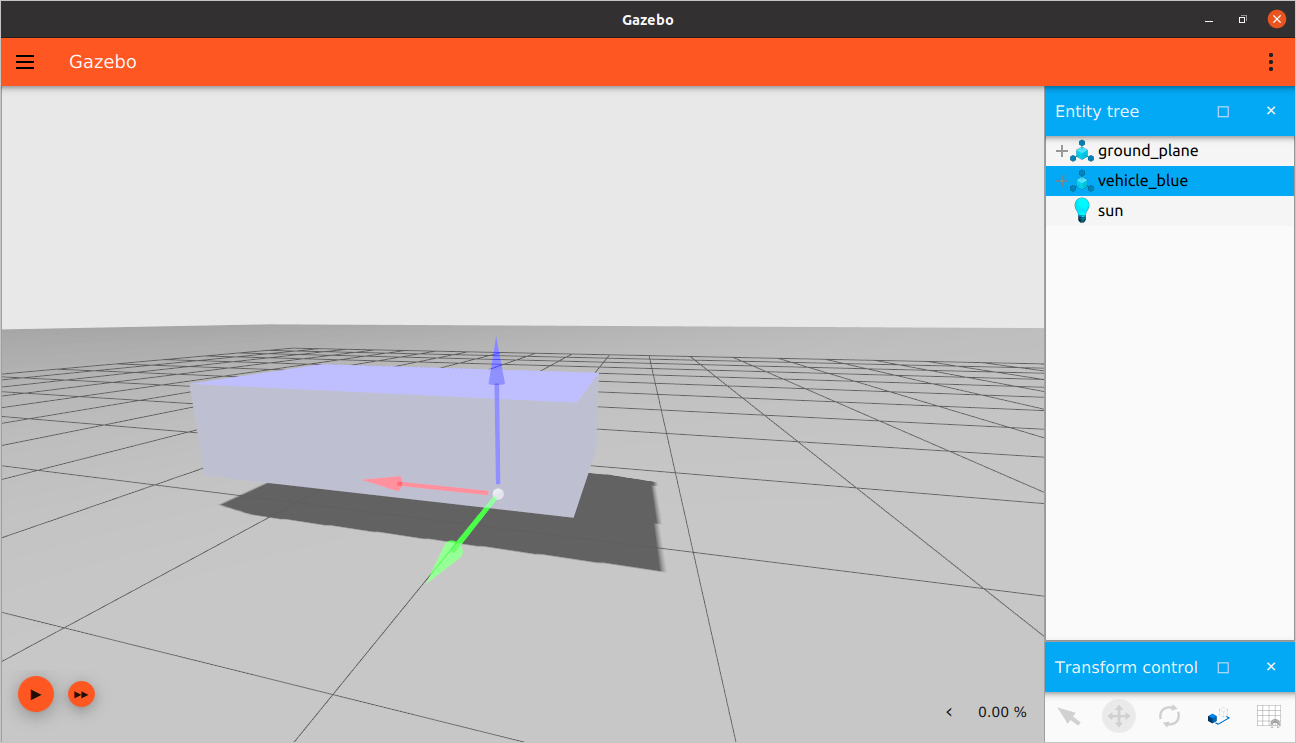
- 这些是我们模型的轴,其中红色是 x 轴,绿色是 y 轴,蓝色是 z 轴。
左轮
- 让我们为我们的机器人添加轮子。
- 以下代码位于 标记之后和 标记之前。
- 属于同一模型的所有链接和关节应在之前定义。
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>- 我们定义了链接 left_wheel 的名称,然后定义了它的
relative_to 底盘链接。 - 车轮需要放置在底盘背面的左侧,因此我们将pose 的值选择为-0.5 0.6 0。
- 此外,我们的车轮是一个圆柱体,但在其侧面。
- 这就是我们将方向值定义为 -1.5707 0 0 的原因,即绕 x 轴旋转 -90 度(角度以弧度为单位)。
- 然后我们定义了车轮的惯性特性、质量和惯性矩阵。
- 视觉与碰撞
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
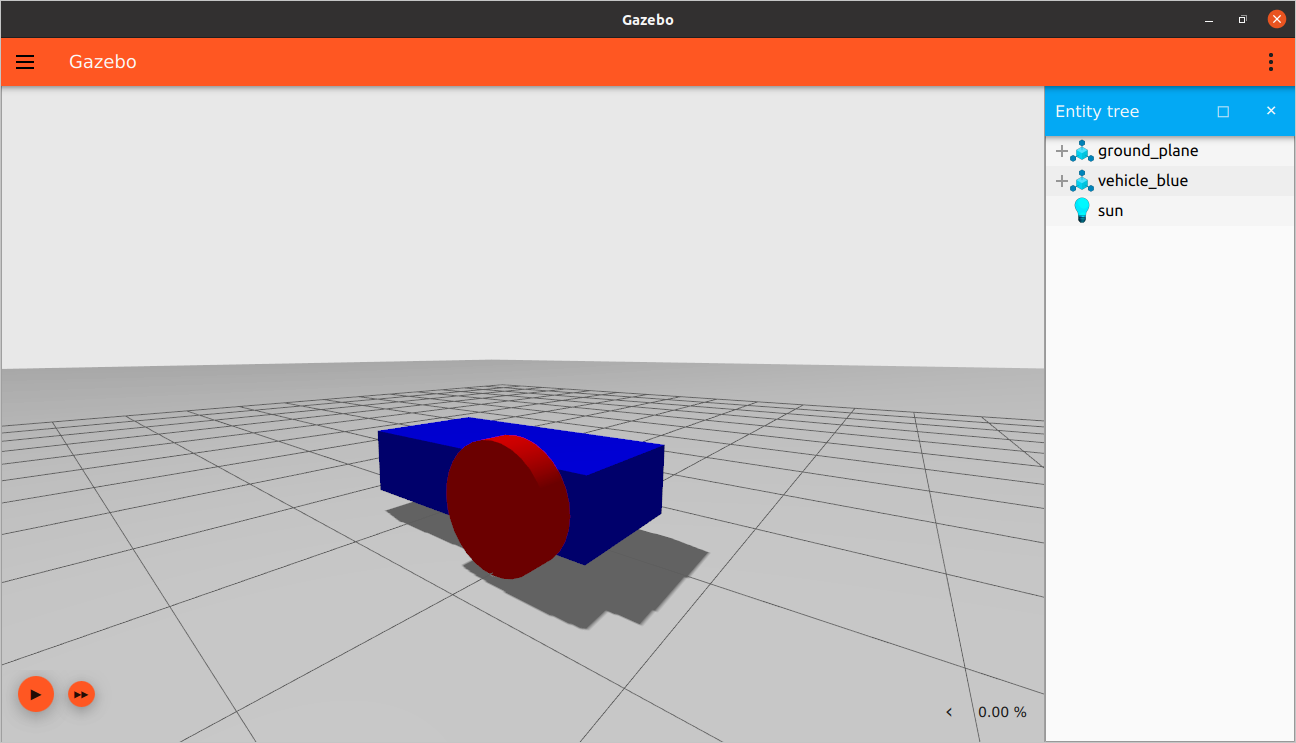
</link>和 属性与前面的链接类似,不同之处在于我们链接的形状具有 <圆柱体> 的形状,需要两个属性:圆柱体的 和 。 - 保存文件并再次运行世界,我们的模型应该如下所示:
右轮:
- 右轮与左轮相似,只是其位置不同。
<!--The same as left wheel but with different position-->
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose> <!--angles are in radian-->
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>增加脚轮框架
- SDF 1.7 的新特性之一是我们可以定义任意帧。 它需要两个属性:
name:框架的名称
attach_to:框架的名称或该框架所附加到的链接。- 让我们为我们的脚轮添加一个框架,如下所示:
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>- 我们给框架命名为 caster_frame 并将其附加到底盘链接,然后使用
标签来定义框架的位置和方向。 - 我们没有使用 relative_to 属性,所以姿势是相对于 attach_to 属性中命名的框架,在我们的例子中是底盘。
- 脚轮
<!--caster wheel-->
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>- 我们的最后一个链接是caster,它的姿势是关于我们上面定义的框架 caster_frame 的。
- 正如你可能注意到的,我们关闭了姿势标签而没有定义位置或方向;
- 在这种情况下,链接的位姿与 relative_to 中的(身份)帧相同。
- 在
和 标签中,我们定义了一个不同的形状 ,它需要球体的 。
joint/关节
- 我们需要将这些链接连接在一起;
标签的作用就在这里。 - 联合标签将两个链接连接在一起并定义它们将如何相对于彼此移动。
- 在
标记内,我们需要定义要连接的两个链接及其关系(移动方式)。 - 左轮关节
<joint name='left_wheel_joint' type='revolute'>
<pose relative_to='left_wheel'/>- 我们的第一个关节是 left_wheel_joint。 它有两个属性:名称 name='left_wheel_joint' 和类型 type='revolute'。
- revolute 类型提供 1 个带有关节限制的旋转自由度。
- 关节的位姿与子链接框架相同,即left_wheel框架。
- 父子关系
<parent>chassis</parent>
<child>left_wheel</child>- 每个关节将两个链接(主体)连接在一起。
- 在这里,我们将chassis与 left_wheel 连接起来。
- chassis 是父链接,left_wheel 是子链接。
- 旋转轴
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz> <!--can be defined as any frame or even arbitrary frames-->
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>- 这里我们定义旋转轴。 旋转轴可以是任何框架,而不仅仅是父链接或子链接。
- 我们选择了相对于模型框架的 y 轴,因此我们将 1 放在 y 元素中,将零放在其他元素中。
- 对于旋转关节,我们需要在
和 标签中定义旋转角度的 。 - 注意:角度以弧度为单位。
- 右轮关节
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>-
除了关节的位姿外,right_wheel_joint 非常相似。 该接头将 right_wheel 与底盘连接起来。
-
脚轮关节
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>- 对于脚轮,我们需要不同类型的接头(连接)。
- 我们使用了 type='ball' ,它给出了 3 个旋转自由度。
测试:
- 上面的完整版本:
<?xml version="1.0" ?>
<sdf version="1.7">
<world name="car_world">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="libignition-gazebo-physics-system.so"
name="ignition::gazebo::systems::Physics">
</plugin>
<plugin
filename="libignition-gazebo-user-commands-system.so"
name="ignition::gazebo::systems::UserCommands">
</plugin>
<plugin
filename="libignition-gazebo-scene-broadcaster-system.so"
name="ignition::gazebo::systems::SceneBroadcaster">
</plugin>
<gui fullscreen="0">
<!-- 3D scene -->
<plugin filename="GzScene3D" name="3D View">
<ignition-gui>
<title>3D View</title>
<property type="bool" key="showTitleBar">false</property>
<property type="string" key="state">docked</property>
</ignition-gui>
<engine>ogre2</engine>
<scene>scene</scene>
<ambient_light>0.4 0.4 0.4</ambient_light>
<background_color>0.8 0.8 0.8</background_color>
</plugin>
<!-- World control -->
<plugin filename="WorldControl" name="World control">
<ignition-gui>
<title>World control</title>
<property type="bool" key="showTitleBar">false</property>
<property type="bool" key="resizable">false</property>
<property type="double" key="height">72</property>
<property type="double" key="width">121</property>
<property type="double" key="z">1</property>
<property type="string" key="state">floating</property>
<anchors target="3D View">
<line own="left" target="left"/>
<line own="bottom" target="bottom"/>
</anchors>
</ignition-gui>
<play_pause>true</play_pause>
<step>true</step>
<start_paused>true</start_paused>
<service>/world/car_world/control</service>
<stats_topic>/world/car_world/stats</stats_topic>
</plugin>
<!-- World statistics -->
<plugin filename="WorldStats" name="World stats">
<ignition-gui>
<title>World stats</title>
<property type="bool" key="showTitleBar">false</property>
<property type="bool" key="resizable">false</property>
<property type="double" key="height">110</property>
<property type="double" key="width">290</property>
<property type="double" key="z">1</property>
<property type="string" key="state">floating</property>
<anchors target="3D View">
<line own="right" target="right"/>
<line own="bottom" target="bottom"/>
</anchors>
</ignition-gui>
<sim_time>true</sim_time>
<real_time>true</real_time>
<real_time_factor>true</real_time_factor>
<iterations>true</iterations>
<topic>/world/car_world/stats</topic>
</plugin>
<!-- Entity tree -->
<plugin filename="EntityTree" name="Entity tree">
</plugin>
</gui>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose>
<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>
<inertial> <!--inertial properties of the link mass, inertia matix-->
<mass>1.14395</mass>
<inertia>
<ixx>0.095329</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.381317</iyy>
<iyz>0</iyz>
<izz>0.476646</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
<!--let's add color to our link-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
</link>
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose> <!--angles are in radian-->
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>
<joint name='left_wheel_joint' type='revolute'>
<pose relative_to='left_wheel'/>
<parent>chassis</parent>
<child>left_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz> <!--can be defined as any frame or even arbitrary frames-->
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>
</model>
</world>
</sdf>- 全部都放在一个文件里后运行测试:
ign gazebo building_robot.sdf- 效果:
- 我们建造了我们的第一个机器人。
- 您可以在此处了解有关 SDFormat 标签的更多详细信息。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号