



















Ignition入门教程-ros2启动差速驱动
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Ignition入门教程-ros2启动差速驱动
说明:
- 介绍如何通过ros2启动差速驱动
步骤:
- 新终端,执行命令
ros2 launch ros_ign_gazebo_demos diff_drive.launch.py- 然后取消暂停并发送命令
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"- 此演示还展示了自定义 QoS 参数的使用。 这些命令被订阅为“可靠”,因此尝试发布“尽力而为”命令将不起作用。 查看两者之间的区别:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
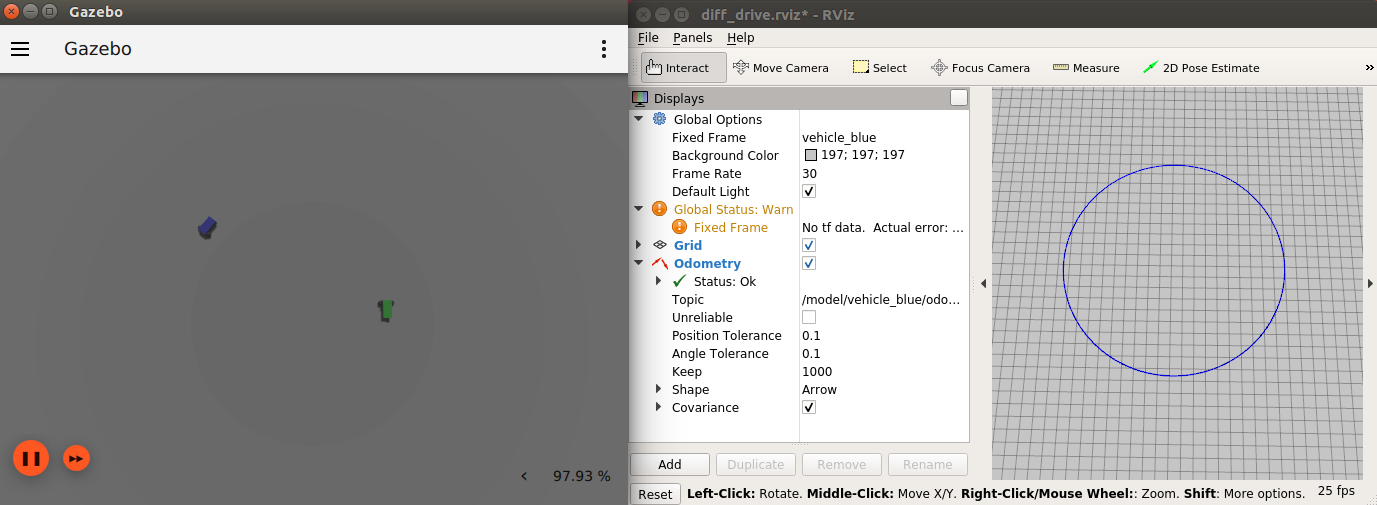
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort- 效果图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号