



















Turbot3入门教程#ROS2版#-OpenCR固件烧录
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本文主要如何烧录OpenCR的ROS2固件
相关设备
- TurBot3机器人套件:采购地址
操作步骤
- 首先先要确认当前的舵机型号是否与环境变量中
MOTOR_TYPE参数的值是否一致 - XL430-W250舵机图

- XM430-W350舵机图
- 如果环境配置的
MOTOR_TYPE参数与当前的舵机型号不一致,则需要更改MOTOR_TYPE参数
$ cat ~/.bashrc | grep MOTOR_TYPE
export MOTOR_TYPE=XL430-W250 # burger motor: XL430-W250 | waffle motor: XM430-W350-
确定舵机型号后,再根据当前系统的ROS2版本烧录对应的ROS2固件
-
Ubuntu 20.04对应的版本应为ROS2 Galactic,Ubuntu 22.04的则为ROS2 Humble
# Ros2 Humble
$ ~/tools/firmware/noetic/loadRos2HumbleFirmware.sh
# Ros2 Galatic
$ ~/tools/firmware/noetic/loadRos2GalaticFirmware.shOpenCR测试
-
测试前,先把小车架高,轮子不要着地
-
接好电源后,打开OpenCR的开关,完成启动
-
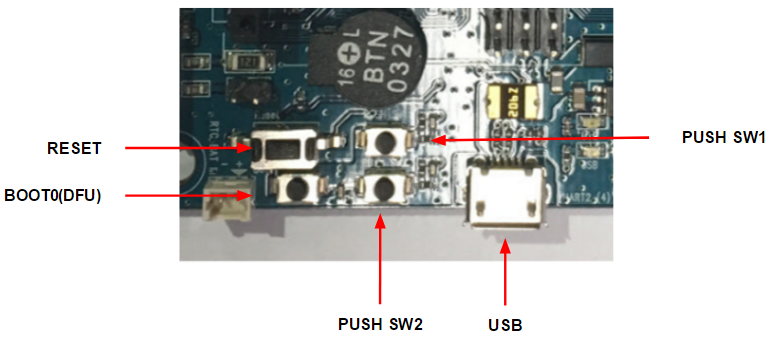
按住
sw1键几秒后,两边轮子同时向前转动,实现前进 -
按住
sw2键几秒后,一个轮子向前转动,一个轮子向后转动,实现转圈
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流