



















Turbot3入门教程#ROS2版#-自主导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要是介绍如果turbo3上使用在自主导航
相关设备
- TurBot3机器人套件:采购地址
操作步骤
- [TutBot3] 启动小车
$ ros2 launch turbot3_bringup robot.launch.py- [TutBot3] 启动导航程序
$ ros2 launch turbot3_nav nav.launch.py map:=$HOME/map.yaml-
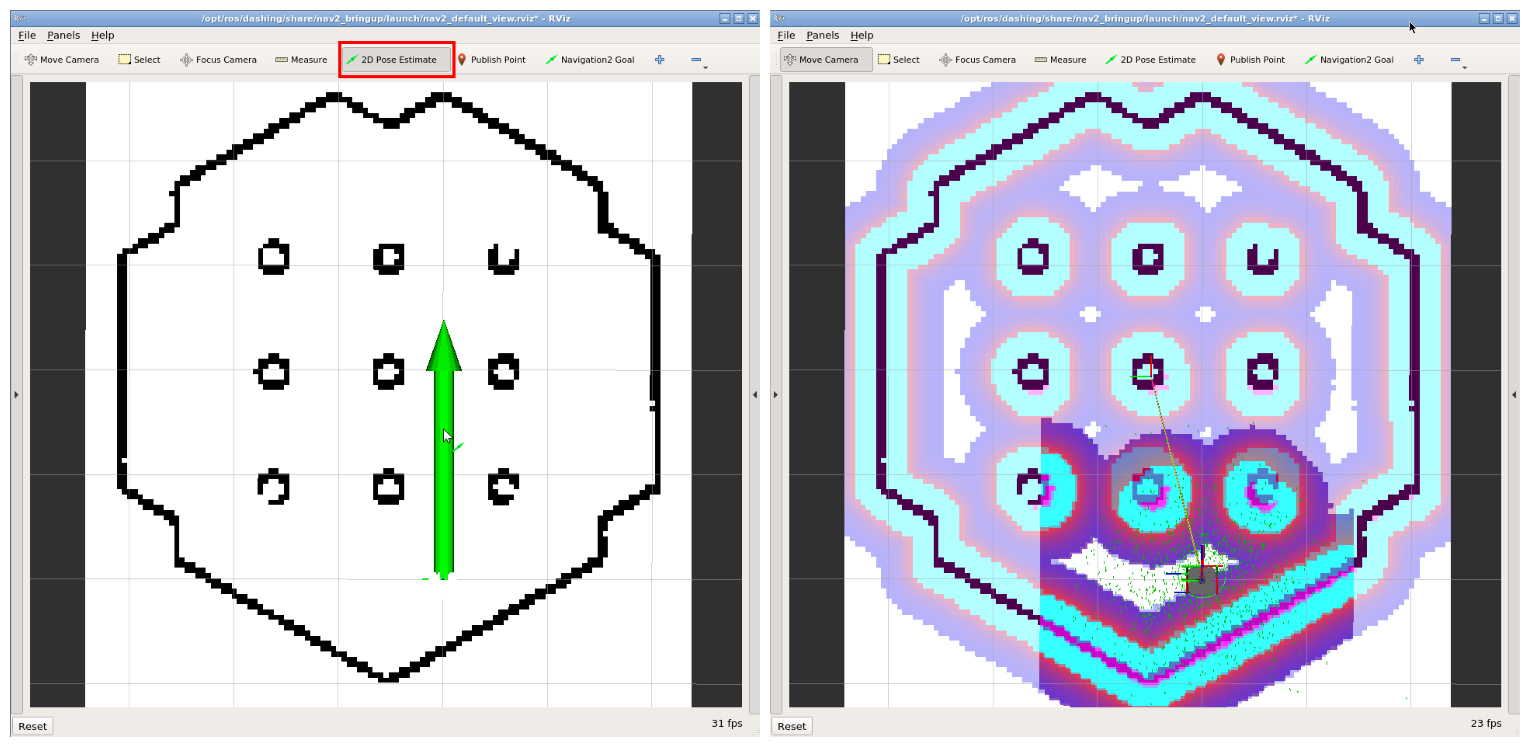
初始化机器人的位姿,在Rviz上点击
2D Pose Estimate,根据当前TB3实际位置在Rviz上的地图使用绿色的箭头初始化对应的位置与方向 -
Rviz上雷达数据的轮廓需与地图上的黑色的边界重合,同时匹配上实际环境
-
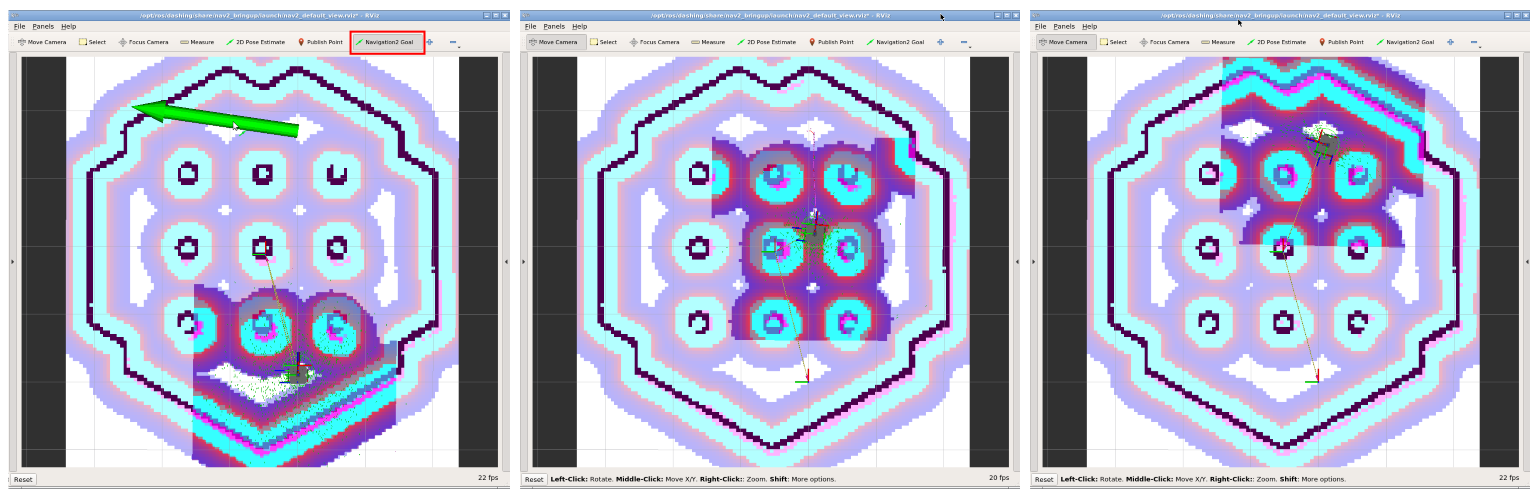
点击RViz上的
Navigation2 Goal按钮,来进行导航 -
点击地图上的一点来设置导航的目的地,绿色的箭头表示机器人到达目的地时的朝向
-
箭头的根部为目的地的
(x,y)坐标,箭头的朝向为角度θ -
一旦设置了 x、y、θ,机器人将立即开始移动到目的地
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=824664668&bvid=BV1Rg4y1g7mW&cid=1086417374&page=1&as_wide=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流