



















Pixhawk无人机教程-5.13 传感器测试 *
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
传感器测试
- 连接到Mission planner
- 启动Mission planner,并通过USB端口连接您的APM或PX4板
- 确保连接了您的APM或PX4板正确的COM端口,然后点击右侧的“Connect”按钮。
- 随着MAVlink连接成功,将APM板移动在不同位置你应该看到了“人造地平线”在HUD相应地移动。
- 从人工地平线上可以看到,当飞机向右倾斜,地平线会倾斜至左侧。 (只需倾斜你的头,你就可以想像到这一点)。
这是正常的! 请不要告诉我们它逆转了;-) 在下面的示例中,飞机向右侧倾斜。
除非你有连接GPS模块,并且在室外有GPS锁定,否则该地图将不会显示你的当前位置。
原始(Raw)传感器显示: 启用原始传感器(Raw)数值并显示方法,如下视频所示
你可以通过单击显示器1的右下角的“tunning”复选框来看到各种传感器的输出。
1 这会弹出一个图表来显示传感器的值。 如果你在点击它的顶部图片
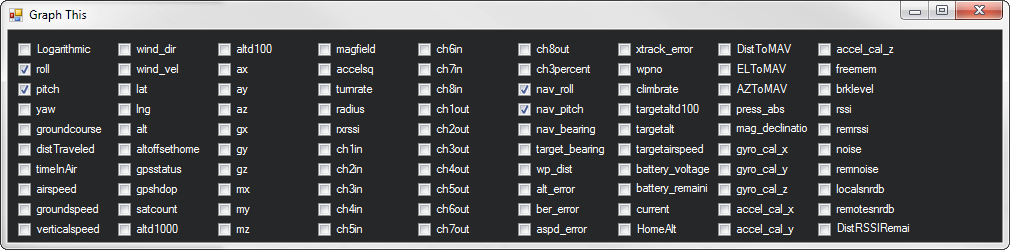
2 它会弹出一个窗口 “Graph this” ,让你选择显示哪个传感器和它的数据输出。

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号