



















Pixhawk无人机教程-5.12.1 CLI设置测试模式
CLI设置测试模式
- Mission Planner命令行解释程序与设置/测试模式
目录
- Mission Planner命令行解释程序与设置/测试模式
- 命令行解释程序(CLI)
- 设置
- 无线设置
- 飞行控制模式
- 检查舵机
- 日志
- 测试
- CLI APM测试套件
命令行解释程序(CLI)
- Mission Planner CLI是一个串行终端行编辑器,它的工作方式类似于过去曾用过的老DOS操作系统。
- 如果你愿意,你可以通过CLI对APM进行设置和测试。
- 只能通过USB数据线进行连接,不能通过无线Xbee/3DR。
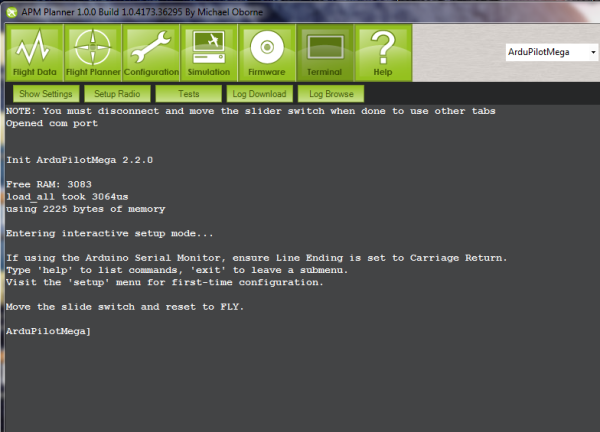
- 通过终端选项卡,在Mission Planner中打开终端(确保串口波特率被设置为115200)。
这样就会打开终端窗口,显示APM CLI菜单(如果不是,请单击窗口并按下“Enter”键三次)。
- 现在,你可以通过在命令提示符下键入它们输入命令。
- 可以随时键入“exit”离开任何模式。
- 在下面的例子中,我将使用另一个串行终端(在使用Arduino的串行监视器情况下)。
- 你可以使用任何你想要的终端,但Mission Planner终端是最直接的。
我在这里键入“help”来查看可用命令的列表。
初始命令:
- “logs”: 日志读取/设置模式。 用于飞行后)
- “setup”: 初始设置模式)
- “test”: 测试模式)
设置
- 安装过程中,为你的RC发射机配置APM和想要的飞行模式。
- 输入“setup”并回车进入此模式。
- 在你飞之前,必须设置设置无线电和模式。
- 还要测试你已经进行GPS锁定(在测试模式下使用GPS命令),这通常意味着在室外测试有着良好的GPS信号。
可用的设置命令是:
- “reset”: APM重置为默认设置。
- “radio”: 配置遥控设置(见下文)。
- “modes”: 为每个RC拨动开关位置设置飞行控制模式(见下文)。
- “compass”: 启用罗盘。 “compass on”或“compass off”。
- “declination”: 设置本地磁罗盘的磁偏角。 可以在以下网址找到当地的磁偏角 此网页。
虽然它被赋予以分和秒,但输入时也是个小数。 So 14?ã 10' E would be entered as 14.10. - “battery”: 启用电池监控。 输入选择0-4(重复进入附加选项)。
0 = 电池监控已关闭
1 = 监控3芯电池
2 = 监控4芯电池
3 = 监控电池电压
4 = 同时监视电压和电流
- “show”: 在EEPROM中显示所有当前的设置。
- “erase”: 擦除EEPROM
无线设置
注意:
- APM不会给遥控接收器或舵机供电(虽然RC设备可以驱动APM)。
- 如果APM是USB供电,还必须给RC APM引脚连接一个ESC/锂电或接收器的电池(通常情况下,ESC会被插入到输出3,而接收器的电池通常会被插入到你的接收器,就可以通过RC对APM供电)。
- 如果不对RC系统单独供电,APM将无法读取其RC输入的任何信号。
在这种模式下,你需要同时将两个操作杆拨向它们的最极端处,如下:
- 移动右摇杆向右上角,然后右下角,然后左上角,然后左下角。
- 然后重复左摇杆。
- 顺序并不重要,重要的是需要将摇杆分别移动到四个角落。
- 保持摇杆在每个角维持一秒。
下面是一个典型的无线安装过程的截图:
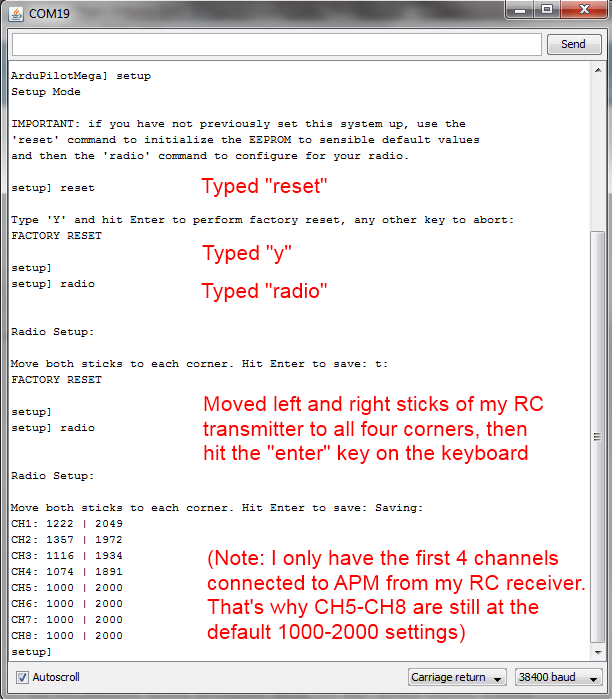
Note: 如上图所示,在已经连接的通道的RC读数最低应该在1,000-1,300,最高应该在1,900-2,000。
(正好是1,000 2,000读数意味着该通道没有连接)。
如果你正在读的都是1500左右,有三个可能的原因:
- 没有在测试过程中把两个摇杆推到其四个角,或者维持的时间不够。
- 摇杆可能连接错误,或者上下颠倒了,或者差错接口了,亦或者没有成功连接上。
- 如果有个早期的APM板,可能需要对其PPM固件进行升级(对于2010年中期后发货的任何板子,都不应该有这问题。)
飞行控制模式
以下是如何设置你的飞行控制模式:
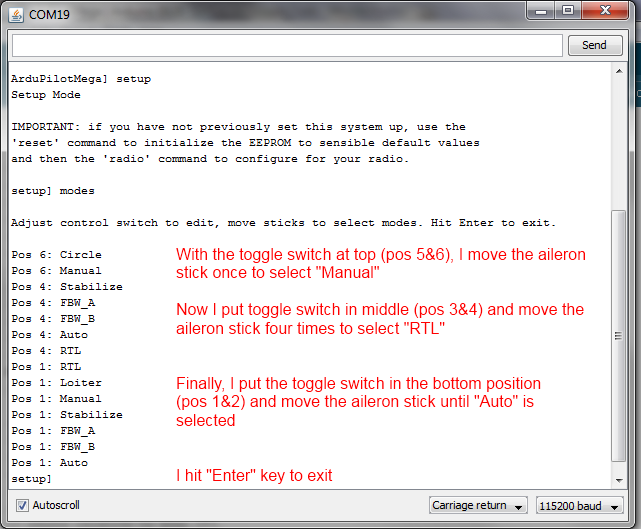
- 在CLI中,进入设置模式。 输入“modes”,然后按返回。
- 现在当你移动你的控制开关到各个位置,你可以看到显示的对应的飞行模式。
- 如果你想改变你的模式,使用方向舵/副翼控制杆。
- 只用把摇杆向左或者向右推动,模式就会改变。
- 按回车键退出该模式并保存更改。
举例如下:
检查舵机
- 现在是时间去看看,DIP开关是不是要翻转一下了。 这里是说明 点我。
- 请记住,如果你飞的升降副翼飞机,你也应该设置DIP开关。
- 如果你飞的普通飞机,发现通道1和2是偶然结合,这意味着你已经意外地得到了它的升降副翼模式。
- 按下最后一个DIP开关向下推去恢复正常。
日志
- 此模式使您可以在板载16MB内存数据闪存中读取和管理飞行日志文件。
注意:
- 尝试使用日志记录功能之前,你必须先擦除其内容。
- 不先擦除会粗问题的,并显示错误的结果。
命令:
- “dump (n)”: 转储日志“n”
- “erase”: 删除所有日志
- “enable (name) or all”: 启用日志记录“name”或所有:
- “disable (name) or all”: 禁用日志记录“name”或所有
测试
- 还可以使用交互式测试模式测试你的硬件和设置。
CLI APM测试套件
- APM带有17个板载测试,这些测试将检查所有主要的子系统。所以可以逐个测试是否正常的工作。
要使用它们,请在CLI中输入“test”和“help”以查看所有不同的测试:
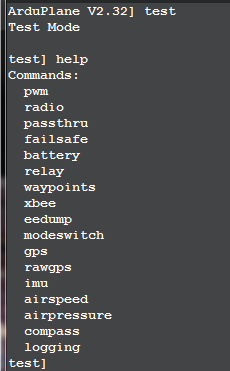
可用的测试:
- “pwm: 显示每个通道的当前输出信号
- “radio”: 显示每个通道的电流输入电RC读数
- “passthru”: 显示RC系统在手动模式下通过的PWM信号。
- “failsafe”: 测试无线链路丢失检测。 按照测试说明进行。
- “battery”: :如果你有电压监测与其连接,可显示当前电池电压。
- “relay”: 测试板载继电器(打开它,并每五秒钟关闭,你应该听到间断响声)
- “waypoints”: 显示目前所设定的航点
- “xbee”: 如果已经连接上,显示从的XBee无线模块输入的数据。
- “eedump”: 转储在板载EEPROM存储器中的当前数据
- “modeswitch”: :显示当前模式切换开关位置
- “gps”: 显示GPS模块的当前数据。 如果为0则你没有GPS锁定。
- “rawgps”: 显示GPS模块原始输出,在GPS诊断问题时有用。
- “imu”: 显示当前计算的x,y和z的高度。
- “airspeed”: 如果连接了,则显示从压差传感器的数据。
- “airpressure”: 显示从板载绝对压力传感器的数据
- “compass”: 如果连接并启用了,显示磁罗盘的数据。
- “logging”: 报告数据闪存的版本和容量
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号