



















Pixhawk无人机教程-7.6 增强你的多轴飞行器的性能
增强你的多轴飞行器的性能
目录
- 增强你的多轴飞行器的性能
- 飞行器升级目标
2.1. 更高的可靠性
2.2. 简洁
2.3. 减轻重量。
2.4. 性能 - 双卫星接收机
- FPV发射机性能的提高
- 相机云台
- FPV相机的提升
- 总结:
如果你刚入魔,并且这是你的第一架多轴飞行器,那么你进入了错误的地方。
请先看这里: 组装你自己的多轴飞行器
这个页面详细介绍了我们的一位成员(Euan Ramasy)的高端霸气的航拍多轴飞行器。
本文介绍了他是对飞行器做了哪些改进和优化来提高飞行器的性能和增加它的功能。
本文是给那些准备给自己的飞行器进行升级和能力挖掘的机友的绝好例子。

飞行器升级目标
嗯,我拥有自己的第一台四轴飞行器(用的APM飞控)已经一年了,我决定要对它进行一些升级。
有如下四个目标需要实现:
- 更高的可靠性
- 更加简洁
- 减轻重量
- 提高性能
更高的可靠性
- 换成了40A的ESC,这样就给了差不多15A的电流冗余(一般情况25A最大电流用30A的ESC)
- 由于在使用spektrum回传模块在低电压时出现了偶尔的噪音,所以我用5.5V BEC代替了原来的5V BEC。
- 重新焊接了电调和分电板,以保证更好的可靠性
- 更换了一个工作时声音不太对劲的马达
- 现在电调升级了并在机身外挂,以实现良好的冷却和更好的安全性。
简洁
- 电池回路从三个减为一个
- 使用了新的5.5V 和12 V BEC
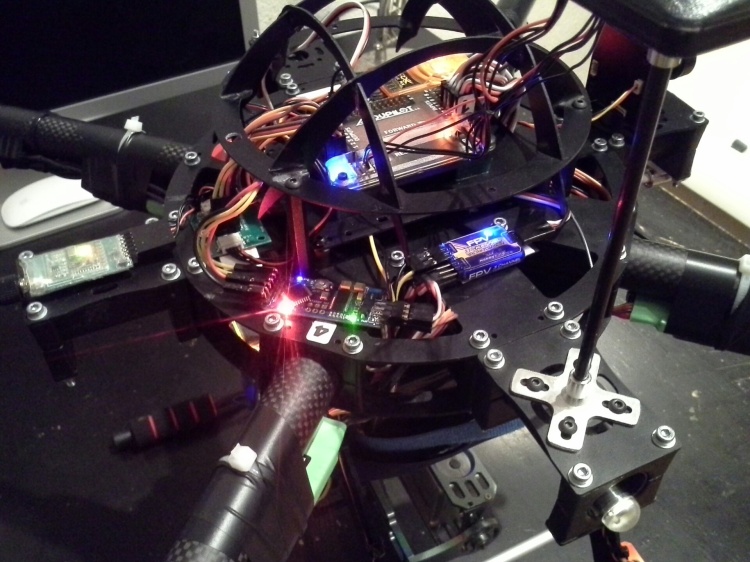
- 去掉了那些没必要的LED。
- 仅仅保留了4个LED来在非FPV飞行时确认机身朝向
- 这些LED是从Braincube处买的,非常亮!
- 给各种东西加了标签。
控制器如下:
减轻重量。
- 电池回路从三个减为一个。
- 用minimOSD代替了原来的EzOSD。
如图所示:一个FPV摄像机开关和遥测连接盒。
 ——移除LED回路
——移除LED回路
- 弃用Spektrum TM1000 遥测模块
- 弃用GPS搜寻器
- 脚架组换成了碳纤维材料
效果如何?
- 最初重量: 3.65 kg ->
- 最终重量: 3.62kg—
所有省掉的大部分重量都用在增加的无刷云台上了。
如果我还是用机架上的无刷云台(没法用Martinez板子调参),我可以省至少200g。
性能
减震棉由moongel换成了zeal。
- 结果实际上振动比原来更高了!
- 在进行高机动飞行时,我已经达到了+/-5的安全极限(校注:振动值)。
- 但是飞机在小舵量操控下的反应更好了。
- 我觉得Zeal比moongel粘的更牢靠。
- PID在3.0.1固件下重新调参,以增加YAW的控制,减少俯仰和横滚(7%)来提高连续视频性能。
- 飞机现在操控依然良好。
通俗的讲: 它更像是一个轻型卡车而不是雪佛兰跑车。
增加6s电流传感器。
- 意味着Compassmot可以在“电流”而不是“油门”模式下进行。
- 飞行明显更加精确,尤其是在返航和漫飞模式下。
换了更高的GPS支杆。
Compassmot的值从4%降到了1%。
云台换成了RCTimer牌的。
- 视频质量显著提高。
- 原来的机架云台没法调参,而且从来都没运行好过。
双卫星接收机
- 接收机换成了DSMX模式的Orangerx 800接收机加双卫星。
- 每个卫星都有一根30cm长的接线,一个远远的装在了机臂下面,另外一个则尽可能远的装在脚架上。
- 虽然并不完美,但是至少比原来好多了。 无论飞机朝向,遥控现在可靠多了。
- 再也没有失控现象了……

FPV发射机性能的提高
- 视频发射机尽可能远的装在脚架上面。
- 使用了600mW的图传和ibcrazy omni家的天线,传输距离从350m提升到600m。
- 扯远点,我现在使用的是“ibcrazy 5”螺旋形电线,使用效果也不错。
- 而且: 使用四分之一波长433mhz数传来进行长距遥测。
它有多不给力? 数传比图传先失去信号..

相机云台
- 相机云台有3处改进。
- 用RCTimer云台代替了原来的机架无刷云台。
- 电池架换成了我自己设计的,自我感觉很爽。
- 我很乐意把它出售给想要的人。
- 我还把原来的减震球换成了更加硬的那种。
- 云台现在在俯仰方向还是有些抖动,但是我需要在matinez里面看看我的遥控输入,我怀疑可能是这里有干扰。

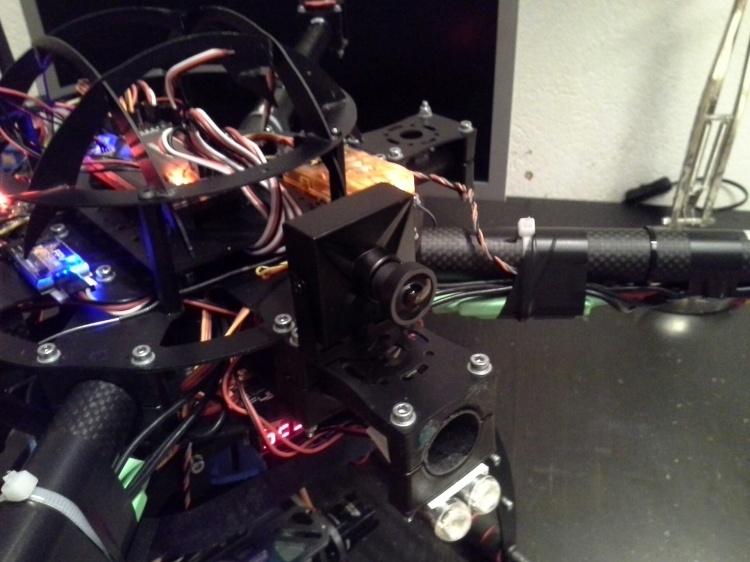
FPV相机的提升
- 最终我弃用了原来的420线FPV摄像头,采用了650线的Security Camera 2000。
- 我还搞来了一些新的低光镜头。
- 这套配置运行比原来好多了。
- 但是我现在还是没法实现miniOSD的视频叠加,但是在Gopro上面就可以正常工作!
总结:
- Euan的改进后的四轴飞行器成为了一个具有强大FPV能力的无刷云台航拍平台。
目前为止他做了如下改进。
- 换用了更好的云台,减震球和固定平台。
- 在FPV方面,采用了更高分辨率和更好镜头的摄像头,而且FPV距离也大大提升。
- 采用了卫星接收机,遥控距离也大大提升了。
- 多个改进使得可靠性进一步提高。
- 移除了一些没用的设备,飞行器更加简洁了。
本文应该在如何配置一个出众的专业性能航拍平台上面给了您一些详细提示。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号