



















Pixhawk无人机教程-5.3.2 Roll速率和Pitch速率的P的调试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Roll速率和Pitch速率的P的调试
- 虽然有很多的增益可对APM:Copter进行调整,要想获得最佳的飞行性能,最关键的是Roll速率和Pitch速率的P值,这个参数将期望的旋转速率转为电机输出。
- 这一项就能让在飞行器更好飞,起码在稳定模式能不错。
关于如何调整这个参数的一些基本建议:
1.调节过高的话飞行器将在Roll/Pitch快速振荡 2.太低的话飞行器将变得反应迟钝 3.大功率多轴应使用较低的增益,小功率多轴要用更高的增益
飞行中调整
Roll速率P和Pitch速率P是可以在飞行中调整的,用你的发射机通道6的旋钮,跟随下列步骤调整:
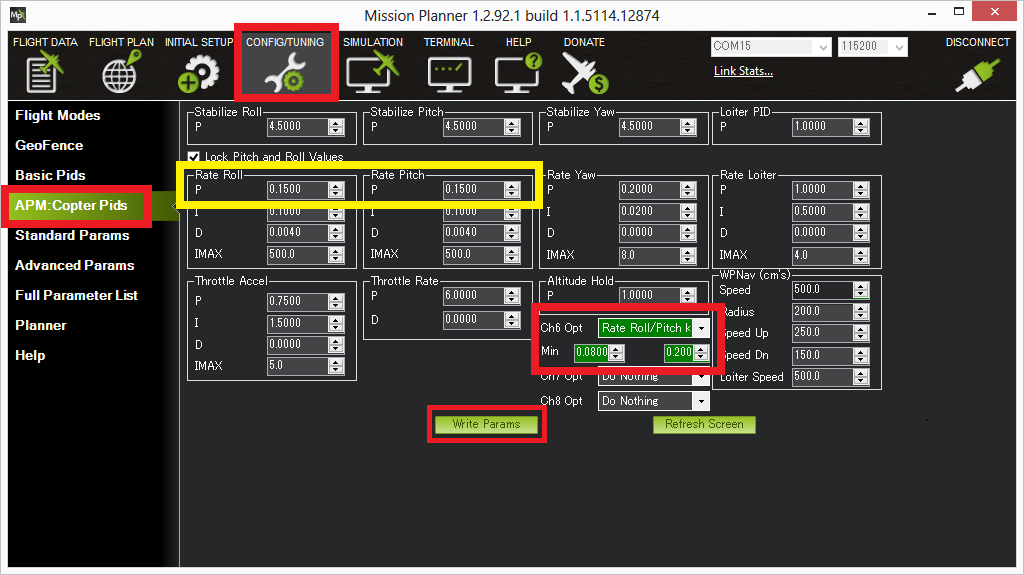
1.把你的APM/Pixhawk/PX4连接至Mission Planner 2.在Mission Planner中,选择 配置/调试>> APM:Copter Pids 3.设置通道6选项为“Rate Roll/Pitch kP” 4.设定最小值为0.08,最大为0.20(多数飞行器理想的增益都在这个范围,尽管一小部分飞行器最大可至0.25) 5.点击“写入参数”按钮 6.将你的发射机通道6旋钮调至最低位,点击“刷新参数”按钮,然后确定下Roll速率P和Pitch速率P的值变为0.08(或者非常接近) 7.将通道6旋钮调至最高位,点击“刷新参数”然后确认Roll速率P变为0.20 8.往回调通道6旋钮至中间位置 9.在自稳模式解锁并飞行你的飞行器,调整通道6旋钮,直到你感觉飞行器很灵活,而且不会抖动 10.飞行结束后,断开锂电池连接然后重新连接APM至Mission Planner 11.通道6保持飞出最佳性能的位置,返回ArduCopter Pids界面,点击“刷新参数”按钮 12.在Roll速率P和Pitch速率P文本框中重新输入你看到的值,但是要有一小点修改,这样Mission Planner才能识别出它有变化并重发送给APM/PX4(注意:如果你重新输入的就是显示在Roll速率P中的数字,它就不会更新)。 举个例子,如果Roll速率P显示的是“0.1213”把它改为“0.1200” 13.设置通道6选项返回至“None”然后点击“写入参数” 14.点击右上角的断开连接按钮,然后再连接 15.确认Rate速率P值就是你在第12步重新输入的
提示:
- 当你调整旋钮时,值是每秒更新3次的。
- 在上方第6步和第7步点击Mission Planner的刷新按钮是必要的,因为APM:Copter不会实时将更新传送给Mission Planner
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号