



















Pixhawk无人机教程-6.15 外置LED指示灯
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
外置LED指示灯
两种LED解决方案
APM/Arducopter有两种推荐的解决方案供你参考:
JDrones I/O板(视频在这里)和LED灯带根据APM/PX4数传口发出的遵循MAVlink协议的信息(有些像minimOSD)更新灯带。 板子上有电源模块可以直接从电池取电。
APM的A4到A11引脚可以直接用于控制LED。
这里是一个团队成员的解决方案你可以购买或者使用达林顿管芯片DIY (像Sparkfun上的这个一样)LED从电池供电。 这篇博客里有更详细的信息。这里是中文论坛上的教程。
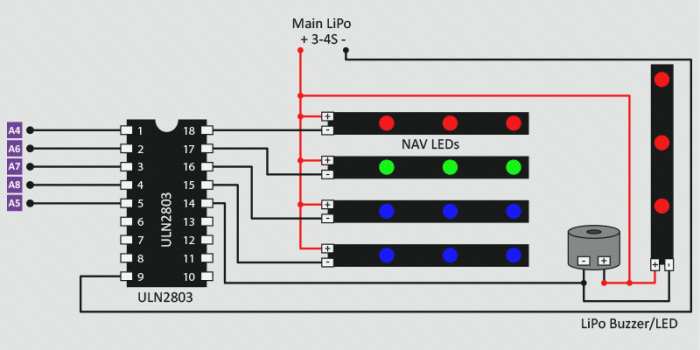
如果你选择直接通过APM的引脚控制,你选择的LED的驱动电流必须小于AVR芯片引脚所能承受的最大电流: 40mA。
APM的引脚输出如下所示:
A4: 辅助LED A5: 蜂鸣器 – 可以直接驱动压电式蜂鸣器(如下所示) A6: GPS – 在没有GPS锁定时闪烁,锁定后常亮 A7 ~ A11: 电机LED
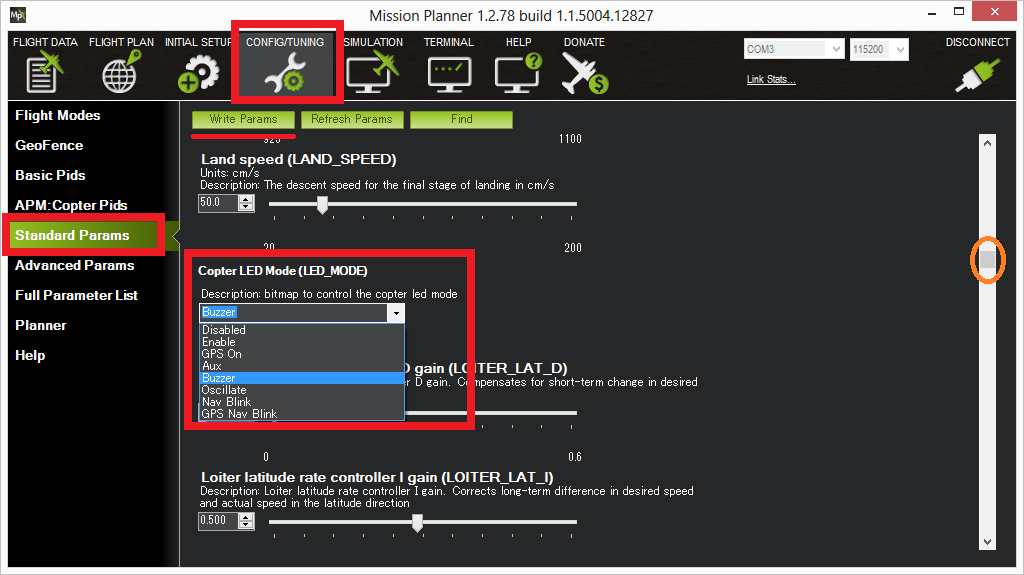
LED灯的启用和闪烁设置可以通过在Mission Planner的配置/调试>Standard Params>Copter LED Mode(飞行器LED模式)的下拉菜单中设置。
蜂鸣器
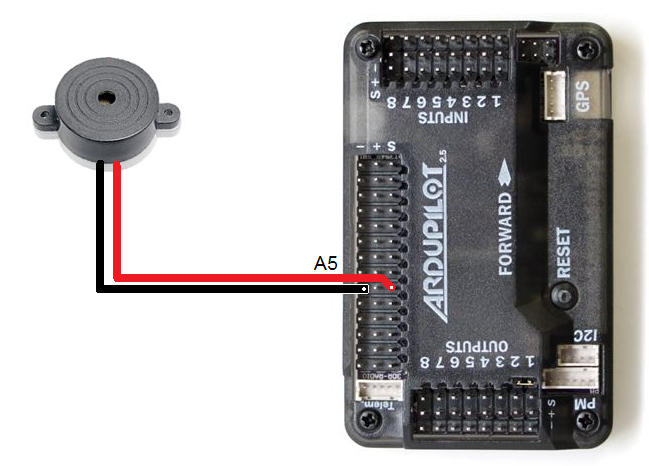
一个压电式蜂鸣器如RadioShack的这个可以直接连接到APM的A5引脚。
如果购买了不同的压电式蜂鸣器,你必须确保蜂鸣器是内部调制的,意思是说当连接5V的输入时,蜂鸣器只响一声。
有些压电蜂鸣器的响声跟外部电路有关,这种蜂鸣器大多用来播放一些音乐,APM是无法驱动这些蜂鸣器的。
如果你正确连接了蜂鸣器,但只听到了类似<咔哒>的一声,那么这就不是一个内部调制的蜂鸣器。
同样需要注意的是电流必须小于40mA。
蜂鸣器的连接方法如下:
蜂鸣器的红线连接A5引脚内侧的信号针脚。 蜂鸣器的黑线连接外侧的接地针脚。
蜂鸣器在下列情况下会鸣叫:
解锁:在解锁程序的开始响两声,结束时响两声(第一次解锁会花较长的时间)。 加锁:飞行器加锁时响一声 低电压:电压低时会有持续的响声。 关掉响声的唯一办法是加锁或者解锁飞行器。
注意: 在AC3.0.1 (和更早的版本) 中,当连接USB口时APM会触发低电压(然后会触发一个响声),这是因为电池电压看起来是零。 这在AC3.1中得到了解决, 但是解决方法仍然只是连接电池(不推荐因为意味着电机通电且可以怠速)或者也可以禁用蜂鸣器。
蜂鸣器的开关可以在Mission Planner的配置/调试>Standard Params>Copter LED Mode的下拉菜单里设置。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号