



















Pixhawk无人机教程-4.5 保存微调与自动微调
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
保存微调和自动微调
都知道刮风对飞行器影响很大,会把飞行器吹到别的地方。可能你也发现了在自稳模式下,尽管无风,飞行器也总是往一个方向漂移。这个问题可以通过“保存微调”或“自动微调”功能解决。
目录
- 保存微调和自动微调
- 保存微调
- 自动微调
- 保存微调和自动微调示范视频
保存微调
保存微调的方法很简单,实质上是把微调信号传送到APM上(演示视频在此)。
1.确保 MissionPlanner的配置/调试 > Mandatory Hardware > Radio Calibration界面。通道7的值在1800以上。

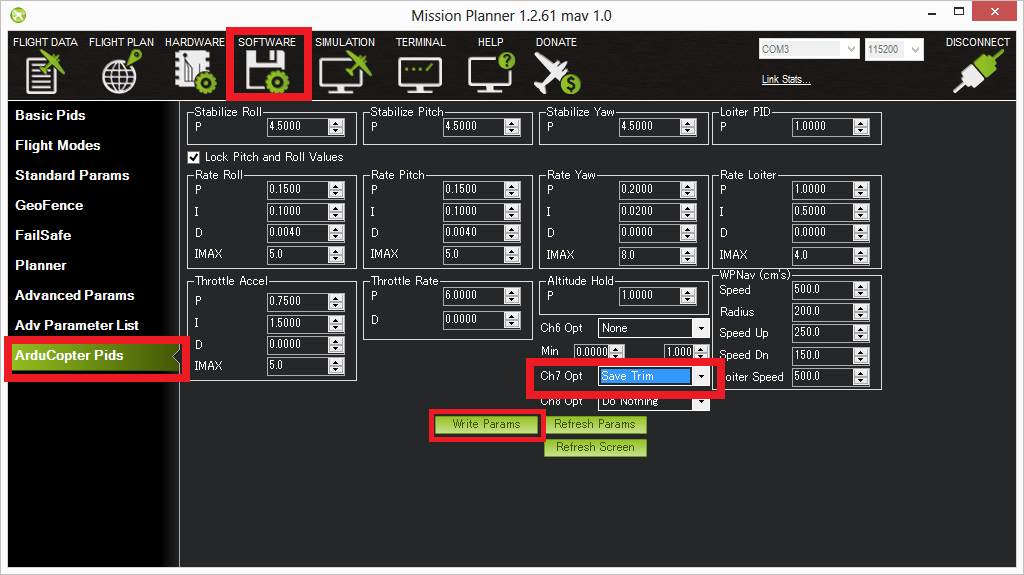
2.在Software > ArduCopter Pids界面,设置通道7选项为保存微调,然后点击“Write Params”键。
3.通道7放到关闭位置,以稳定模式起飞,之后使用Roll和Pitch微调功能,调整至飞行平稳。 4.降落,然后油门拉到0 5.放开roll和pitch杆,打开通道7至高位至少1秒。 6.发射机的roll和pitch微调调整到中间位置,然后再次试飞应该可以平稳飞行了。不行的话,就重复3、4、5步骤。
自动微调
用自动微调功能,捕获你稳定悬停时的操作,对roll和pitch进行微调 1.找个没有风,够大的地方,保证安全飞行。 2.油门往下拉,方向向右保持15秒,或者直到你看到红色led、蓝色led和黄色led灯,做周期性的闪烁。 3.稳定的悬停飞行大概25秒。 4.降落,然后油门拉到最低,等几秒(微调已经被保存在eeprom中了)。 5.以自稳模式再次起飞,看看飞行是否平稳。如果不是,重复步骤2,3,4。
注:
上述过程,可以不接电池在在地面上测试。连接APM至电脑,打开Mission Planner,上述步骤完成后看,飞行数据页面是否会如你的模拟显示。

注2:
你可以在Advanced Parameters页面设置微调。Roll微调对应AHRS_TRIM_X,Pitch 微调对应AHRS_TRIM_Y。两个参数是左roll和前pitch的取反得到的值,以弧度表示的。
注3:
飞行器不受漂移的影响几乎是不可能的,所以飞行器保持飞行完全静止,也是不可能的。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号