



















Pixhawk无人机教程-5.3.3 自动调参
自动调参
目录
1 自动调参
2 概览
3 如何使用自动调参
4 闪存记录
概览
自动调参是在ArduCopter 3.1-rc5版本以上固件里才有的功能。 自动调参功能可以自动调整Stabilize P和Rate P、Rate D的参数,从而得到更高的灵活性,也不会有大的超调。 通过在飞行中自通过不断的roll和pitch动作中来得到最佳的PID参数,所以在使用自动调参前必须切换至定高模式。
如何使用自动调参
把某一个飞行模式设定为定高模式
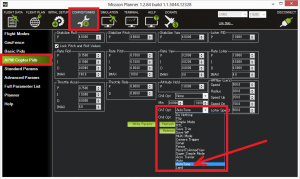
把通道7或者通道8设定为自动调参的开关
在起飞时确保通道7或通道8处于低位
在一个晴朗的天到一个开阔的场地进行试飞
起飞然后在一个合适的高度切到定高模式
将通道7/通道8拨至高位以开启自动调参模式:
此时你将看到飞机以20°左右来回要摆几分钟,然后在前后方向重复同样的过程。
如果飞机漂的过远,我们可以打杆让它飞回来(此时飞机用的是最初设置的PID参数)。 飞回来之后我们松开遥控器摇杆,自动调参将会继续进行。
如果我们想终止自动调参,我们只需要把通道7/通道8打回低位,此时自动调参将会终止并且切回最初的PID参数
自动调参完成后,飞机将会切回最初的PID参数设置
如果想测试自动调参得到的PID参数的飞行效果,我们需要把通道7/通道8先切回低位,再打到高位,此时使用的就是自动调参得到的PID参数
如果想继续使用最初的PID参数设置,把通道7/通道8打到低位即可
如果你觉得自动调参得到的PID参数飞行效果不错,我们在给飞机上锁的时候保持通道7/通道8高位,这样新的PID参数将会保持并且覆盖最初的PID参数。 如果你觉得自动调参得到的参数不太好,我们在给飞机上锁的时候保持通道7/通道8低位。 此时自动调参得到的参数就不会保存。
注意:
- 目前为止,与自动调参有关的问题都与机架有关:APM的减震棉太软或者机臂松动。
- 为了得到最佳的自动调参参数,我们要控制飞机在自动调参时的飞行速度。
- 在自动调参时候要注意快速地修改飞机的姿态,这样可以控制飞机的速度不至于过快。
请注意在自稳模式时,自动调参也可以启动。在启动自动调参之前,要确保飞机已经切到定高模式,要避免误碰。
如果要反馈自动调参的相关问题,请提供详细的机架信息与飞行数据。
闪存记录
ATUN (自动调参概要)与ATDE (自动调参详情)的信息会写入到闪存记录中。 具体的相关内容请参见wiki的闪存记录页面。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号