



















Pixhawk无人机教程-4.1.11 自稳模式 Stabilize Mode
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
自稳模式 Stabilize Mode
自稳模式是APM:Copter中最常用的的飞行模式。 本页面提供在自稳模式下飞行的要点,以及得到自稳模式最佳飞行效果的调试方法。
目录
- 自稳模式
- 概览
- 调试
- 从闪存记录中评估性能
- 常见问题
概览
- 飞手用roll与pitch操作控制飞行器的倾斜角度。
- 当飞手松开roll与pitch摇杆时,飞行器将会自动水平。
- 在有风的环境中,飞手需要不断的修正roll与pitch以让模型定点停留。
- 飞手用yaw操作控制转向速率。
- 当飞手松开yaw摇杆时,飞行器将会保持它的朝向不变。
- 飞手的油门输入控制马达的平均转速,这意味着这如果想保持高度,需要不断的修正油门。
- 油门输入会根据模型的倾斜角度自动调整(比如在模型倾斜过大的时候会自动增大油门),以弥补飞手操作飞行器倾斜所带来的高度变化。
在AC3.0.1及以前版本的固件中,飞行器只有在自稳或者特技模式下才能解锁。
警告:在进行其他模式的飞行之前,熟练掌握自稳模式下的飞行是必不可少的,强烈建议飞手在出现突发情况时能够迅速切回自稳模式以避免事故。
调试
- ANGLE_MAX 控制的最大倾斜角,默认值是4500,代表45°。
- ANGLE_RATE_MAX 控制飞行器的最大roll与pitch速率,默认值是18000,代表180°/ 秒。
- ACRO_YAW_P 控制飞行器改变朝向的速率。
- 默认值是4.5,代表将偏航摇杆向左或者向右打到最高时,自旋速度是200°/秒。
- 更高的数值代表更快的自旋速度。
Stabilize Roll P和Pitch P控制飞行器对于roll和pitch输入信号的响应速度,即飞行器操纵的跟手程度,以及实际与期望roll与pitch角之间的误差。
- 默认值是4.5,代表每存在1°的误差时,将以4.5°/秒的速度进行修正。
- P值越高,飞行器的修正与响应速度越快。
- 过高的P值将会导致飞行器前后震荡,类似于跷跷板似的动作。
- P值越低,飞行器的修正与响应就会越慢。
- 过低的P值将会当值飞行器反应缓慢,在有风的情况下甚至会导致坠机。
Rate Roll/Pitch的 P,I ,D参数影响马达的输出,基于上述的自稳(角度)控制器期望的飞行器倾斜速率来控制。
- 这些参数与飞行器的自身动力相关,动力较大的飞行器一般需要比较小的rate PID 值。
- 例如可以加速很快的飞行器可能适合的Rate Roll/Pitch P值是0.08,而加速比较缓慢的飞行器可能适合的值是0.18.
Rate Roll/Pitch的P是调好飞行器的最重要的参数。
- 更高的P值意味着马达将以更大的响应以获得期望的转向速率。
- P的默认值是0.15,适合标准的Arducopter。
Rate Roll/Pitch的I 是在外力作用使得飞行器无法长时间保持期望的速率时,用来补偿外力作用的的负效应的。
- 高I值会快速达到期望的速率,也可以在飞行器快速减慢避免飞过头。
Rate Roll/Pitch D 是用来抑制飞行器在加速修正至期望位置时的反应程度的。
- 过高的D值会导致飞行器出现异常震动与“记忆效应”,即飞行器控制缓慢反应迟钝。
- 根据模型的不同,取值一般在0.001与0.02之间。
参见AC2_attitude_PID 以获取更多的调参信息。 AC3.1及更高版本固件含有自动调参功能,可以帮您自动获得最佳的 Stabilize和Rate PID值。
从闪存记录中评估性能
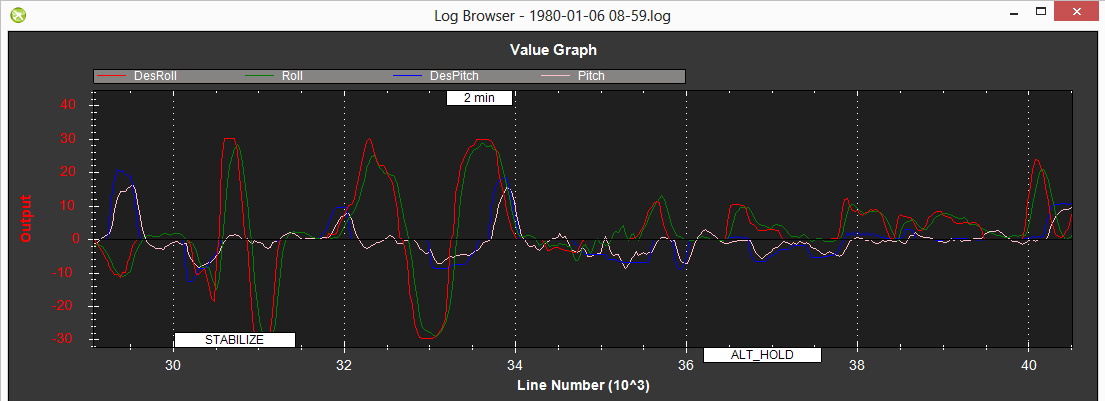
查看自稳模式的性能,最佳方法是读取您在飞行时的闪存数据,然后用mission planner打开,绘制Roll-In 和DesRoll (预期横滚角度)对比 Roll (实际横滚)的曲线,以及Pitch-In 和DesPitch (预期pitch角度) 对比Pitch (实际俯仰角度)的曲线。 这两个曲线如下图所示。
常见问题
- 刚装的飞行器在起飞时秒翻。
- 这个通常是马达顺序错误、马达转动方向错误或者螺旋桨方向(顺时针或者逆时针)安装错误造成的。请检查您的APM2或是PIXHAWK的接线。
- 飞行器在roll或者pitch方向上来回晃动。
- 这个通常意味着Rate P值不对。请参阅上面的调参部分来正确调整参数。
- 飞行器在快速下降时来回晃动。
- 这个是飞行器在快速下降时螺旋桨的惯性转动所导致,这个问题基本没法解决,增加Rate Roll/Pitch P 值可能会有所改善。
- 飞行器在起飞时向左或者向右自旋15°。
- 这可能是因为某些马达没有垂直安装或者电调没有校准。
- 飞行器老是在无风的环境中朝着某一个方向飘。
- 请用保存微调或自动调参以让飞行器水平。
- 飞行器在空中无法定高或者完美的保持位置。
- 如上面所说,在自稳模式下想要定高定点,必须不断的修正飞行器姿态。
- 在roll或者pitch方向偶尔会抽搐。
- 通常这个是由于接收机被干扰(例如FPV设备离接收机太近)或者电调的问题(可能通过校准电调得到解决)。
8.飞着飞着就翻了。
- 这个一般都是由电调或者马达的机械故障造成。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号