



















Pixhawk无人机教程-4.1.2 定高模式 Altitude Hold
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
定高模式 Altitude Hold
在高度保持模式,可以在保持高度的同时允许控制roll、pitch、yaw。这页包含如何使用和调试定高的重要信息。
目录
- 高度保持模式
- 概览
- 控制
- 调试
- 从闪存日志中验证定高的性能
- 常见问题
- 足够的功率
概览
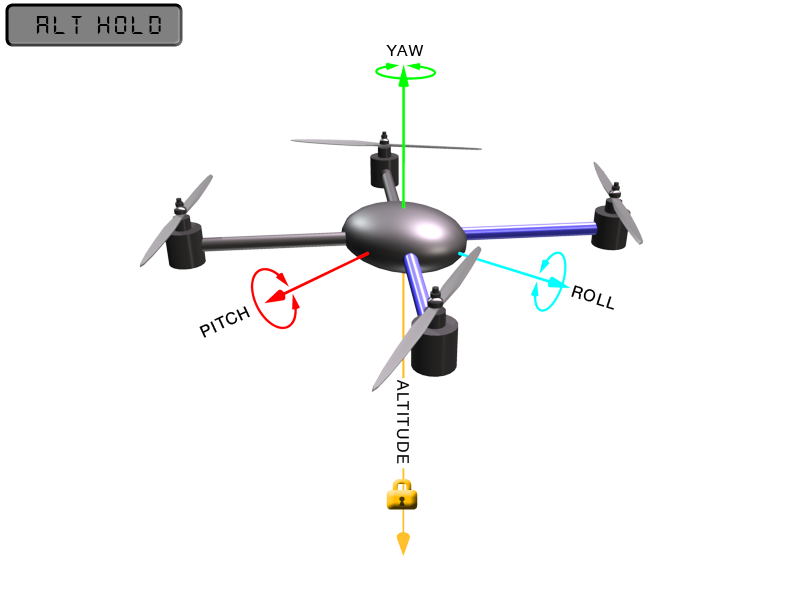
在高度保持模式(简称定高)模式下,主板会自动控制油门,从而保持高度不变。Roll、Pitch和yaw的操作与 自稳模式 一样。都是直接控制飞机的转动角度和朝向。
自动高度保持是多种飞行模式(Loiter, Sport等)的一种,所以这里的信息也适用于这些模式。
警告!飞控使用气压高度计测试结果作为高度基准。如果在飞行区域的气压出现变化,飞行器的飞行高度将会受气压变化的影响而不准确,飞行高度就不是实际的高度(除非另外安装了超声波测距,并且飞行高度小于20英尺)。26尺以下使用超声波测距会向飞行器提供更精确的飞行高度。
控制
可以通过油门杆控制飞行器上升和下降的速率。
定高模式下,AC3.1以及之后的版本有解锁和锁定两种模式。飞机在锁定状态时,在解锁前,必须原地复位几秒,使内部电路检测并指示已经着陆,才能解锁。当油门保持中挡(在40%-60%的地方),飞行高度不变。 超出这个范围,飞行器会不同程度的(由油门控制)上下浮动。上升和下降最大值是2.5m/s。最大值由飞行参数PILOT_VELZ_MAX设定。
调试
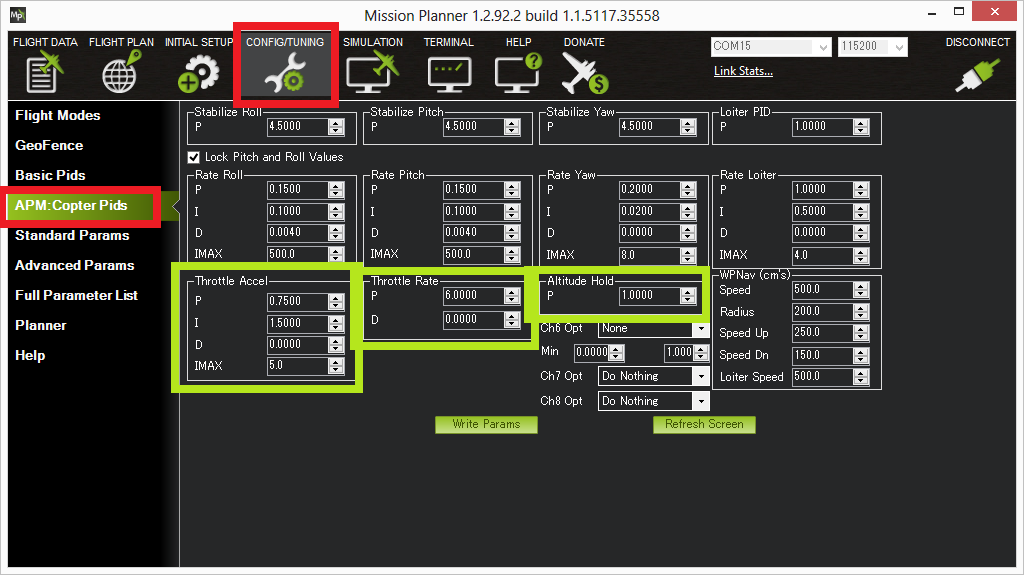
Altitude Hold选项下的变量P用于转换高度误差(期望高度和实际高度)至想要上升或下降的比率。P值越大,定高能力越强,但如果设置得太高会导致油门不稳定。
Throttle Rate选项下用于(通常不用修改)把期望的上升或下降速率转换成对应的加速度。
油门加速的PID测得输出电动机的加速度转换误差(即所需加速和实际加速之间)。如果修改P和I的值,应该保持 P : I = 1 : 2(I值是P值的两倍)。这些值不应增加,对于非常强大飞行器都减小50%,可能会获得更好的效果(即P值为0.5,I值为1)。 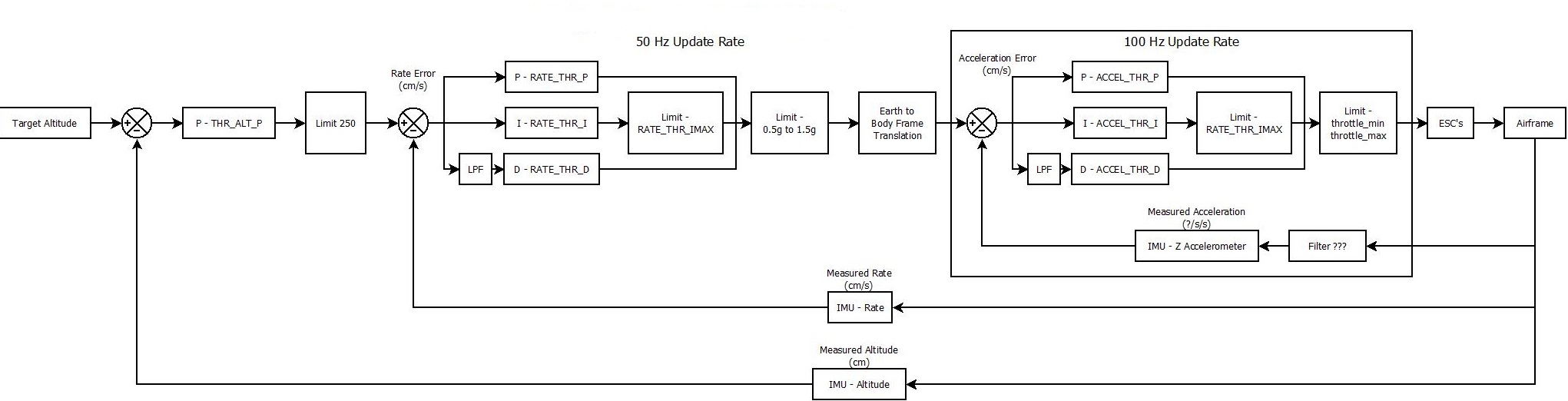
从闪存日志中验证定高的性能
检查高度保持的性能,最好的方法是从飞行器上下载飞行日志,然后用mission planner打开,图形化CTUN信息的气压高度(BarAlt)、目标高度(WPAlt)、 最后是GPS信息的RelAlt(基于高度的惯性导航,奇特的是不包含GPS数据)。定高性能正常情况下:这三个图和如下所示。

常见问题
- 使用定高模式时,剧烈振动可能导致飞行器迅速上升。请访问震动检测和震动抑制Wiki页面,详细了解如何检测和减少震动。
- 飞行器缓缓下降或上升,直到控制其稳定才会正常。一般情况下,是由于油门摇杆没有在中间位置导致的。这种情况通常发生在从手动飞行模式(如稳定模式)切换到定高模式时,没有在中档悬停一会导致的。请参阅相关Wiki页面油门位置设置。
- 正当定高开启的时候,电机停了一下,然后就很快恢复正常。这通常发生在快速攀爬时进入定高模式。在飞行器转换到定高模式的时候设定目标高度,由于上升太快,而超出了预定位置。保持高度的控制器,暂时“急刹车”减速,直到开始回退到目标高度。解决方法是在飞行器稳定时再进入定高模式。
- 气压的变化会造成飞行器跑偏,向上或向下几米,且持续很长的时间,或者在地面站显示的高度不准确,偶尔会出现的负高度(即高度低于“家”的高度)。
- 高速向前飞行超出预定高度后,瞬时显示高度降低为1m ~2m。这是由于空气动力学效应,在飞行控制器上形成瞬时低压,安装的高度保持控制器,认为它是向上爬,所以执行下降命令调整。目前没有解决的办法,虽然增加了INAV_TC_Z 参数设置为7(默认值为5)可以减少影响,但又导致上述常见问题#1。
- 飞行器接近地面或降落时,高度保持性能变得不稳定。这种情况可能是由螺旋桨涡流致压力变化。解决方案是使飞行控制器远离螺旋桨涡流影响,或在适当通风的罩内保护它。
- 强光照射气压计会引起突然地高度变化。APM2.x在2013年中之后在外壳内部贴上黑色胶带以对抗这个问题。
足够的功率
- 足够的功率是非常重要的,如果没有足够的功率,控制器就会和电机争电用,这会导致飞机飞不到想要的高度。
- 理想情况下,约50%油门就可以悬停,高于70%是很危险的。
警告:如果配置了混合指数(译者注:原文为expo,单词是exponential,可以让油门曲线中部更平缓)会增加定高油门的死区。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号