



















Pixhawk无人机教程-6.7 PX4FLOW Overview *
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
PX4FLOW Overview
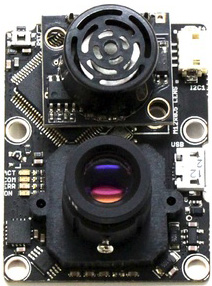
The PX4-FLOW Optical Flow Camera Board
The PX4-FLOW Smart (Optical Flow) Camera is a specialized high resolution downward pointing camera module.
It uses ground texture and visible features to determine aircraft motion over the ground.
The PX4-FLOW incorporates the same powerful Cortex M4F Microcontroller as is used in the PX4-FMU.
The PX4-FLOW internally performs automated binned pixel image analysis to determine aircraft motion relative to the ground.
The PX4-FLOW module is capable of extremely accurate navigation and automatically updated coordinate acquisition.
A Built in 3 axis gyro enables automatic compensation for aircraft tilt and heading relative to the ground.
The PX4-FLOW Camera includes a Maxbotix EZ4 SONAR for determining exact ground relative altitude.
The EZ4 series SONAR is the recommended low noise, narrow beam SONAR that is most successful in !MultiCopter use.
PX4FLOW Camera with SONAR
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号