



















ROS与AR.Drone-坐标系
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
坐标系
- 驱动发布三个TF转换在不同的坐标系,odom, ${base_prefix}_link, ${base_prefix}_frontcam 和${tf_prefix}/${base_prefix}_bottomcam
- ${base_link}是参考系的共享前缀名,可以通过参数来设置,默认是ardrone_base
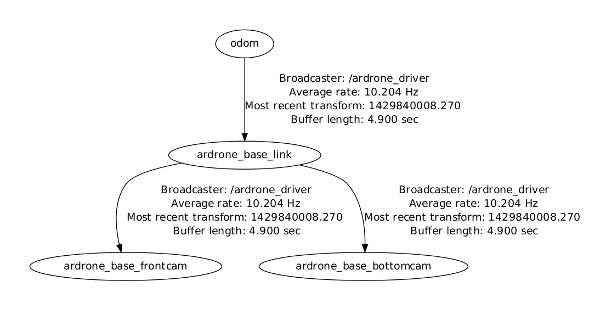
在所有发布的主题(navdata, imu, cameras)头部的frame_id都有对应的系名,都兼容ROS REP 103
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号