



















linorobot入门教程-别名
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
linorobot入门教程-别名
说明:
- 介绍如何添加相应硬件的别名
- 雷达和teensy的端口都是使用静态,所以需要添加别名便于自动关联静态端口名称
步骤:
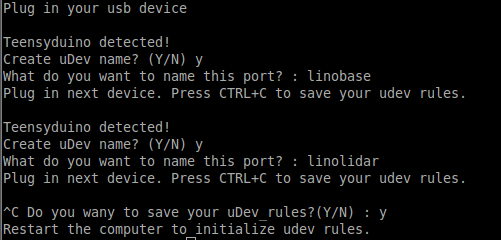
- 执行添加命令:
rosrun lino_udev lino_udev.py- 分别定义
Teensy board对应为"linobase"
雷达对应为"linolidar"- 如图:
- 复制规则
sudo cp 58-lino.rules /etc/udev/rules.d/58-lino.rules- 重启udev
sudo service udev reload
sudo service udev restart- 重插teensy和雷达的usb
- 检测确认:
ls /dev/linobase
ls /dev/linolidar纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号