



















linorobot入门教程-运行
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
linorobot入门教程-运行
说明:
- 介绍如何运行linorobot
步骤:
- 架空机器人,让车轮不要着地
- 检查车轮的方向是否正确,执行前向运动,轮子向前,后向运动,轮子向后
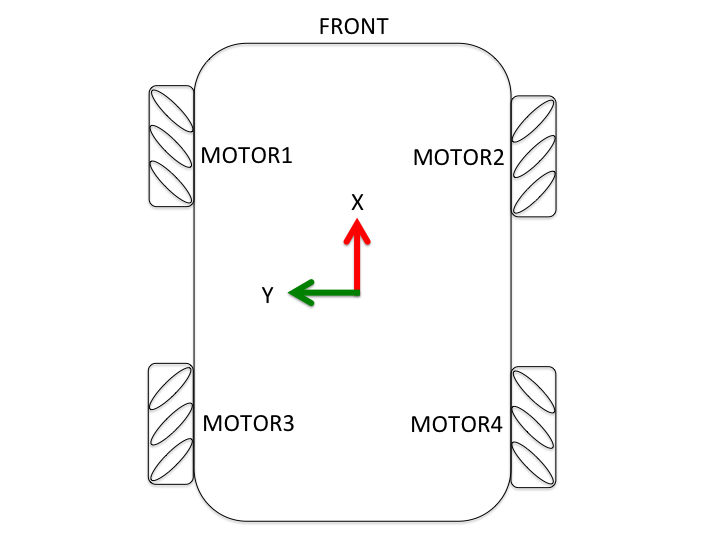
- 如果是麦轮车型,注意车头方向,如图:
- 在机器人电脑上执行:
roslaunch linorobot bringup.launch- 在开发电脑上执行:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py- 根据终端显示的字母来控制运动
- 如果是阿克曼小车,因为不能原地旋转,所以角速度会转化为舵机的角度,按J是向左,按L是向右
检查编码器读数:
- 启动bringup之后,检查编码读数是否正确
- 前向运动,编码器读数增加
- 后向运动,编码器读数减少
问题:
- 如果轮子的方向是反的,交换配置文件中MOTOR*_IN_A and MOTOR*_IN_B定义的PIN脚
- 如果编码的读取是反的,交换配置文件中MOTOR*_ENCODER_A and MOTOR*_ENCODER_B的PIN脚
- 如果舵机的方向是反的,交换如下的IF中的定义:
if(steering_angle_deg > 0)
{
steering_angle = map_float(steering_angle_deg, 0, 90, 90, 0);
}
else if(steering_angle_deg < 0)
{
steering_angle = map_float(steering_angle_deg, 0, -90, 90, 180);
}纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号