



















BlueROV入门教程-SOS泄漏传感器设置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
BlueROV入门教程-SOS泄漏传感器设置
说明:
- 本教程介绍如何在BlueROV水下机器人上如何进行SOS泄漏传感器设置
操作步骤
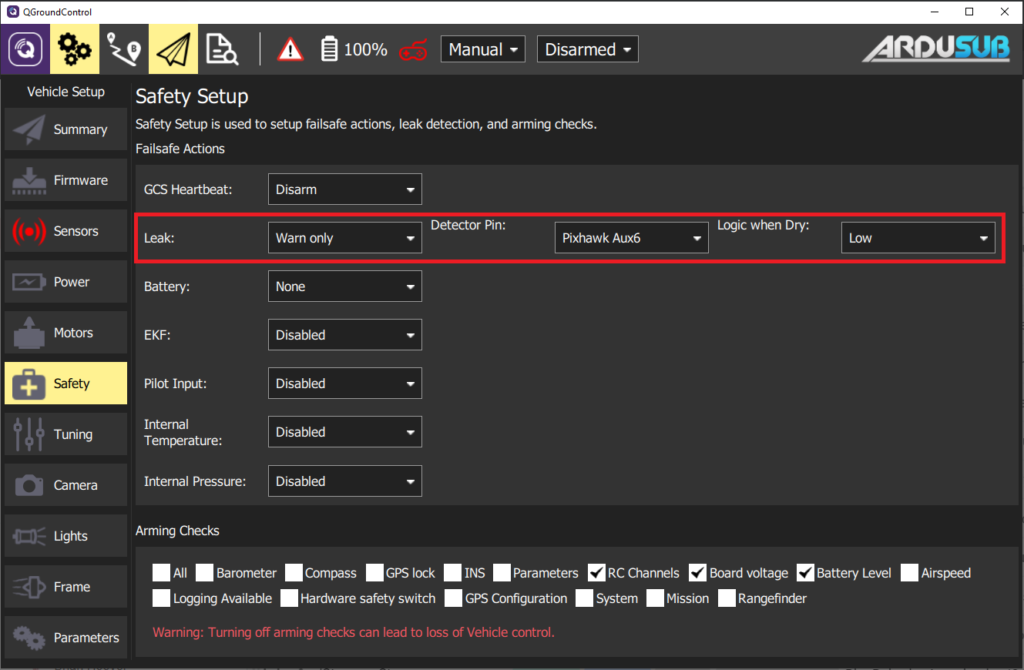
- 进入
安全选项卡 -> 探测针脚选择Pixhawk Aux6 ->Logic when Dry设置为Low。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号