



















BlueROV2入门教程-手柄校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
BlueROV2入门教程-手柄校准
说明:
- 本教程介绍如何进行BlueROV2水下机器人的手柄校准
概要
-
某些操纵杆需要进行校准,然后才能将其与QGroundControl配合使用
-
比如有些游戏手杆的摇杆位置不准确,当连接上BlueROV2,启动电机控制时,可能电机可能就一直在转,这种情况也需要校准
-
如果您的操纵杆需要校准,那么
载具设置页面上的游戏手柄选项卡将红色,您应按照以下步骤进行校准
操作步骤
注意:校准手柄请不要开启电机控制
-
将手柄连接上电脑
-
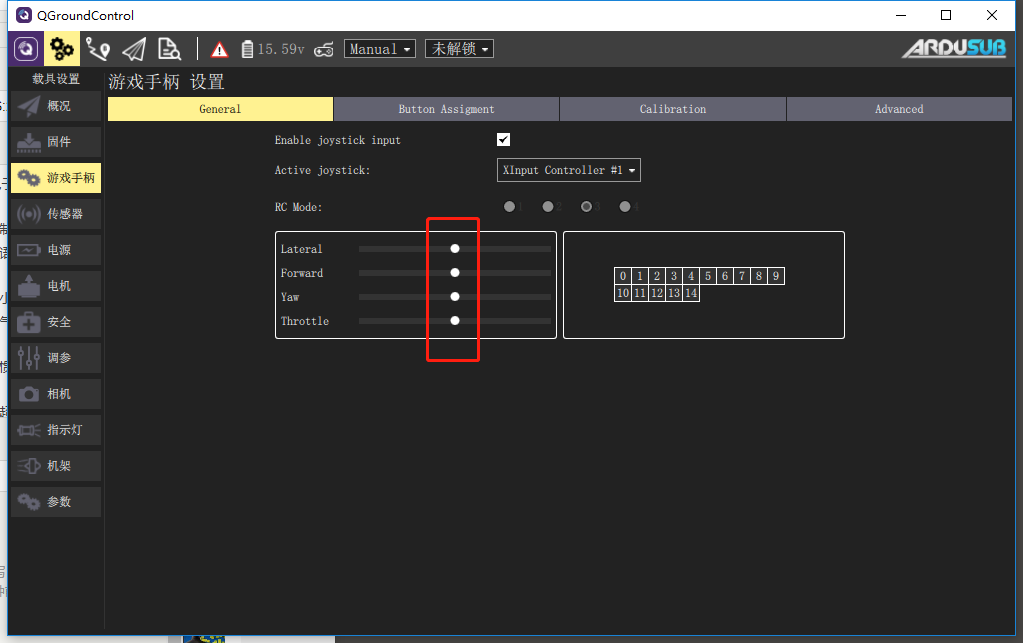
打开QGroundControl中
载具设置页面上的游戏手柄选项卡 -
在
General页面上将,确保将RC Mode设置为3
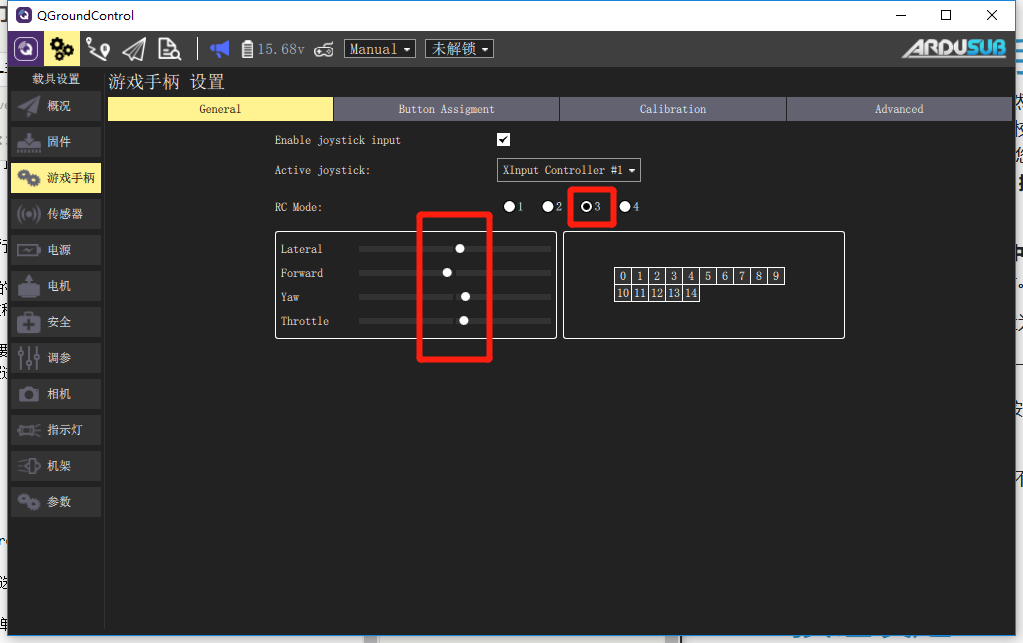
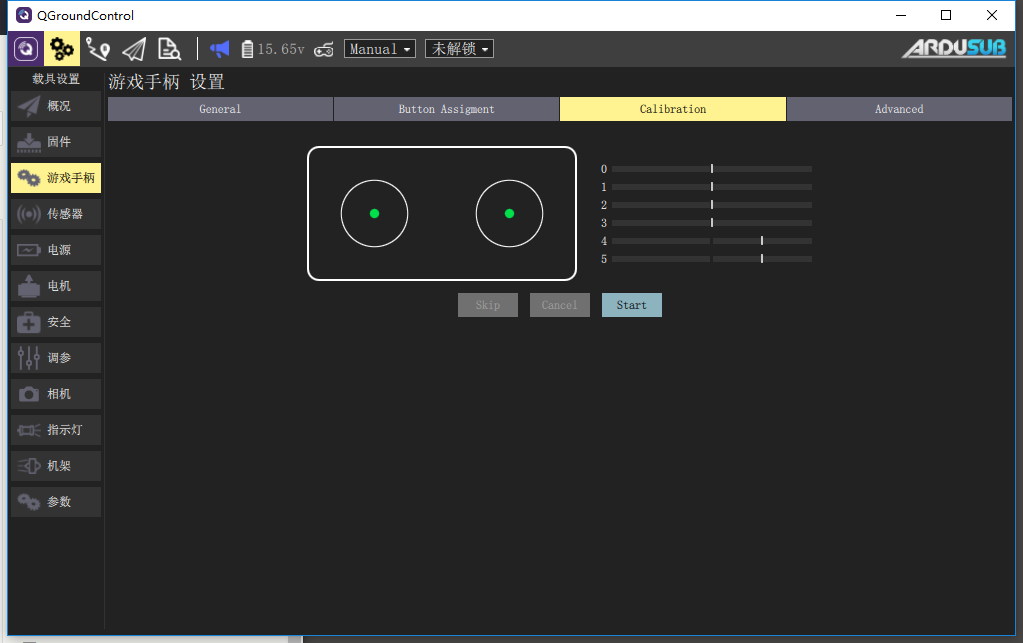
- 打开
Calibration,然后单击Start
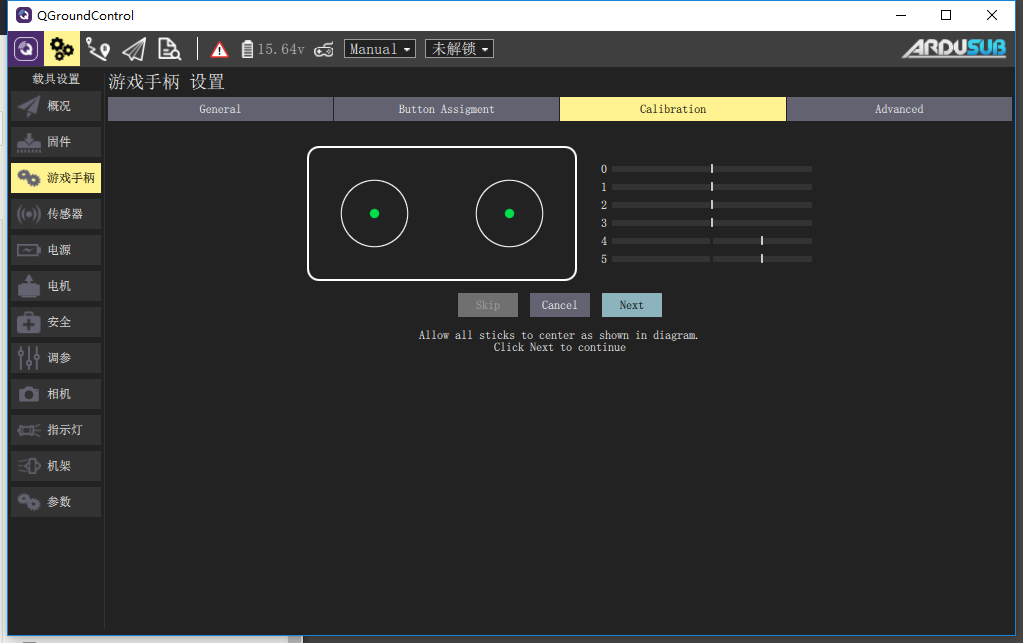
- 按照分步说明进行操作,按照QGroundControl中的图所示移动操纵杆
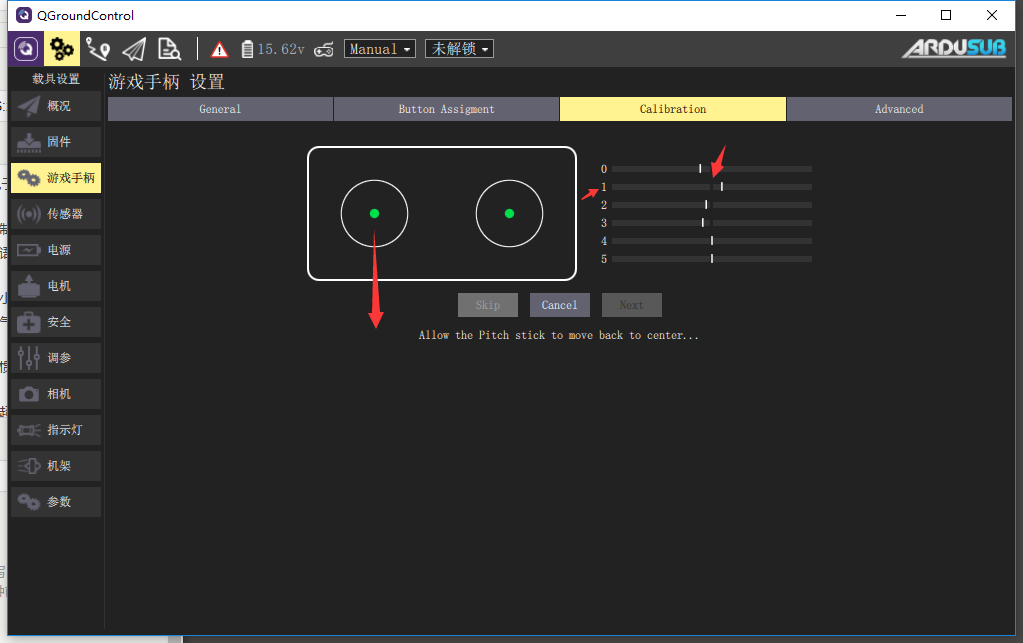
- 因为
RC Mode设置为3的时候,下拉右边摇杆代表后退操作,所以在最后一步时,应将右边摇杆垂直往上推,使1号线的游标移动到中心
- 校准完成后,
游戏手柄选项卡不再出现红色标志,同时看到界面上的游标都已归零
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号