



















BlueROV2入门教程-手柄控制
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
BlueROV2入门教程-手柄控制
说明:
- 本教程介绍如何使用手柄控制BlueROV2水下机器人
概要
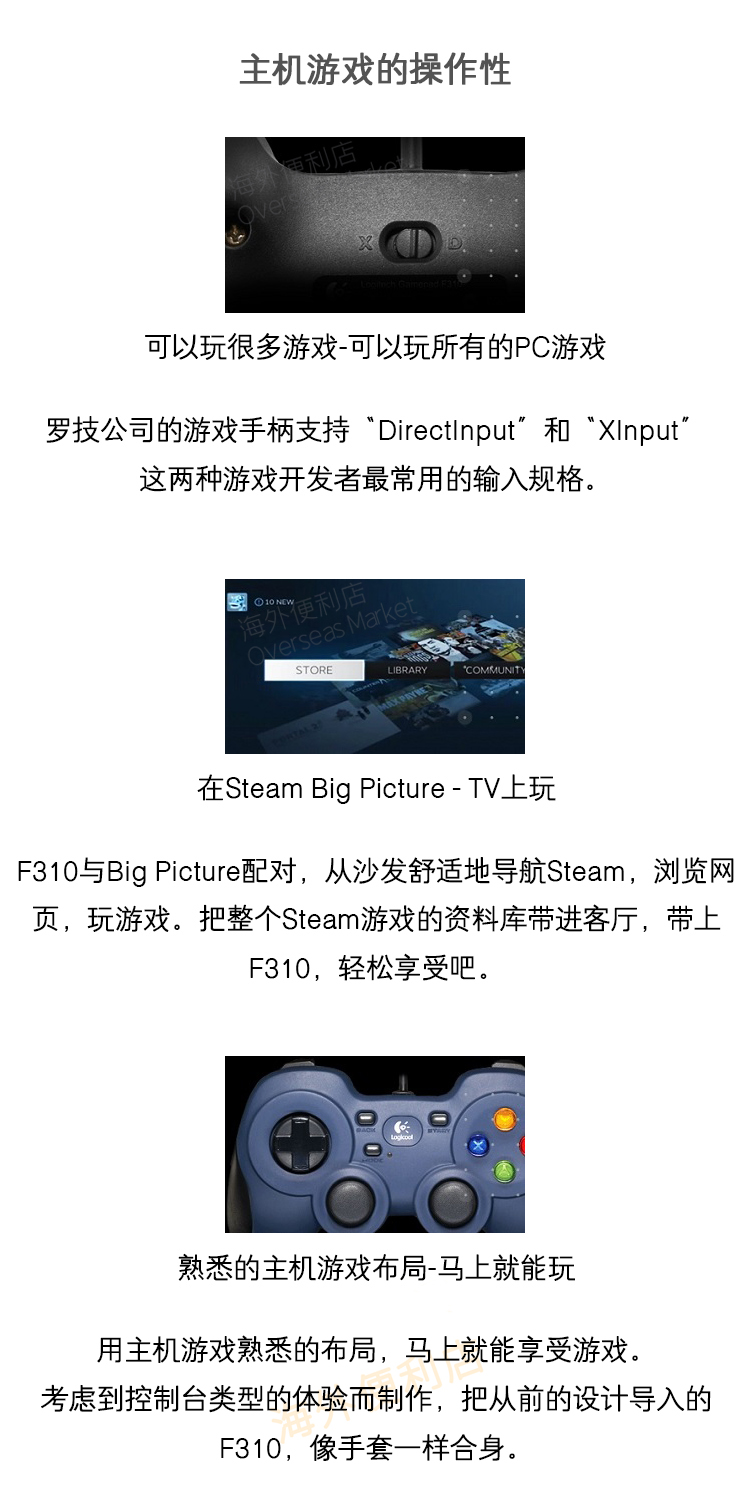
- 官方推荐使用Logitech GamePad (F710 and F310) 和 Xbox 360 或者 Xbox one 手柄,但同样支持PS4等手柄
手柄键位说明
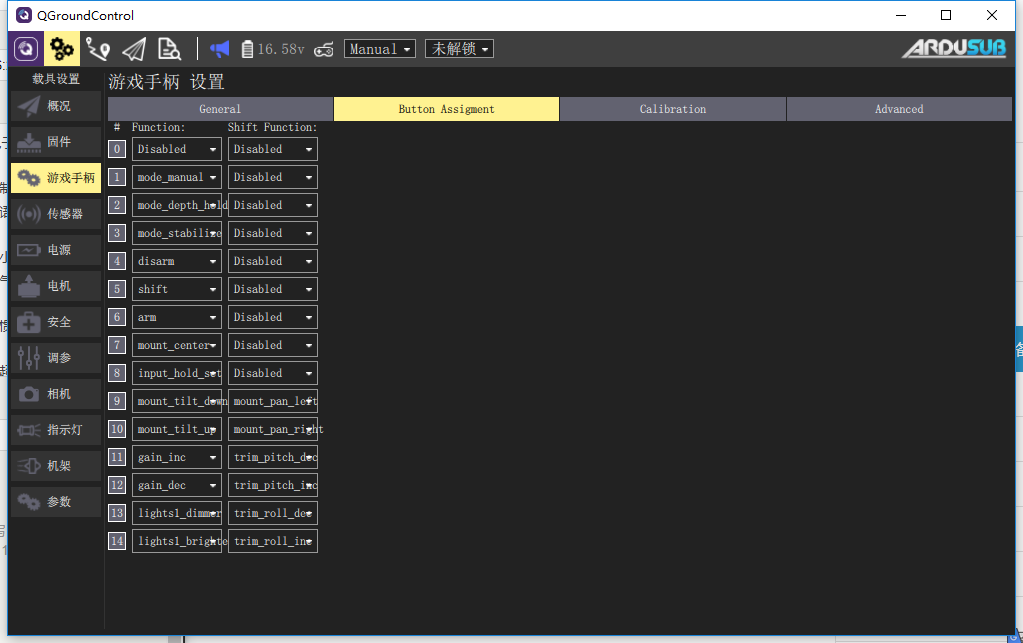
- BlueROV2默认按钮设置

-
如果您不喜欢这种按钮布局,则可以在QGroundControl中更改按钮设置
-
打开QGroundControl -> 进入载具设置界面 -> 进入游戏手柄界面
-
在General界面下,按下您想要更改的按钮,按钮编号将亮起,记住这个编号
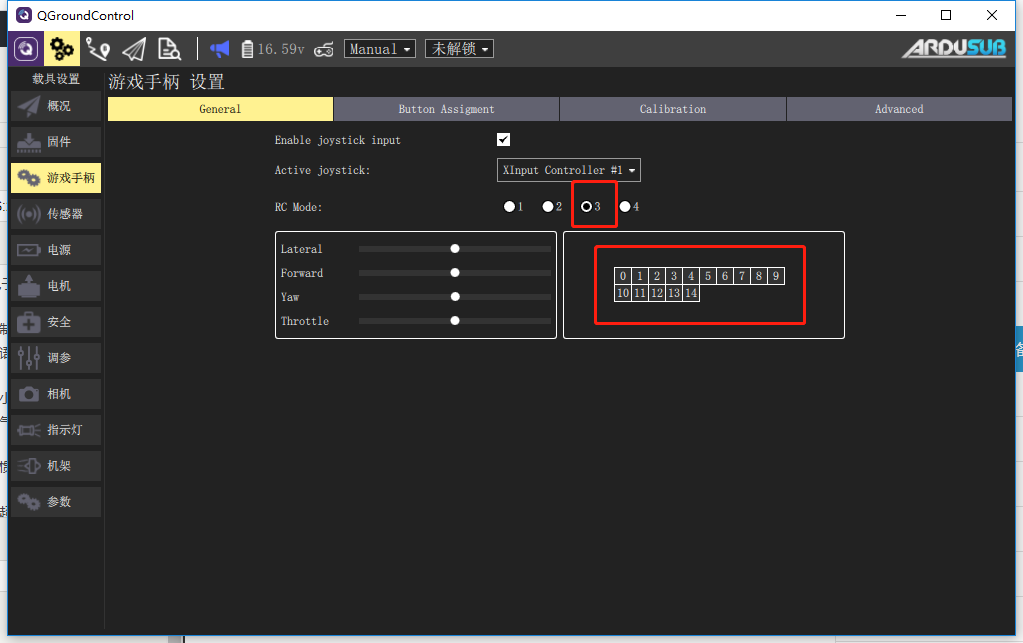
- 然后在Button Assignment界面下修改对应的编号设置
- 潜水模式
- In Manual Mode the BlueROV2 will only output motor controls based on the pilot input from the joysticks. There is no feedback stabilization, heading holding, or depth holding.
- In Stabilize Mode the BlueROV2 will stabilize roll to level and it will maintain heading when not commanded to turn. The vertical control is left entirely to the pilot.
- In Depth Hold Mode the BlueROV2 will hold depth unless you command it to dive/ascend. It will also stabilize roll to level and maintain heading when not commanded to turn.Xbox 360 or Xbox one 手柄配置
-
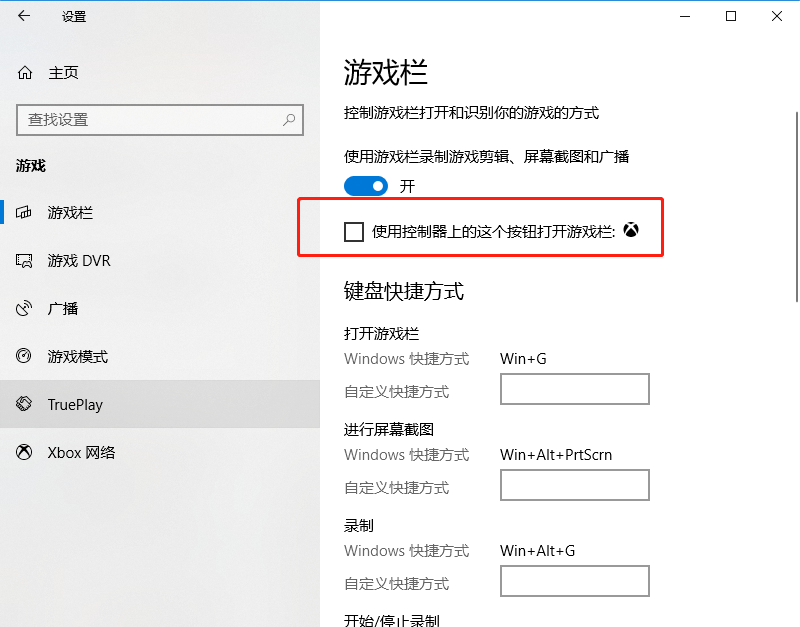
win10下需要设置关闭西瓜键
-
按win键进入开始界面 ->
设置->游戏->游戏栏-> 取消选中“使用控制器上的这个按钮打开游戏栏”选项
-
mac下需要安装驱动 | 下载链接
-
Ubuntu上已预装了对应的驱动
Logitech GamePad (F710 and F310) 配置
- 这个需要将后面的按钮设置为
X
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号