



















MissionPlanner入门教程-指南针校准
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
MissionPlanner入门教程-指南针校准
说明:
-
本教程介绍如何在Mission Planner地面站上校准指南针
-
测试环境:Mission Planner地面站 + Pixhawk 2.4.8 + Neo-M8N GPS模块
操作步骤
注意:飞控如果加了GPS(并且GPS带罗盘),可以校准外置罗盘,不需单独校准内置罗盘
-
校准罗盘成功后,飞控要断电重新连接,这步一定要做
-
只使用外置罗盘的好处是,外置罗盘不容易受干扰,内置罗盘如果受干扰容易出现“罗盘不同步”的错误
请注意:如果使用M8N带IST8310的GPS,必须刷3.5 V3以上固件,低于3.5或者V2无法识别

-
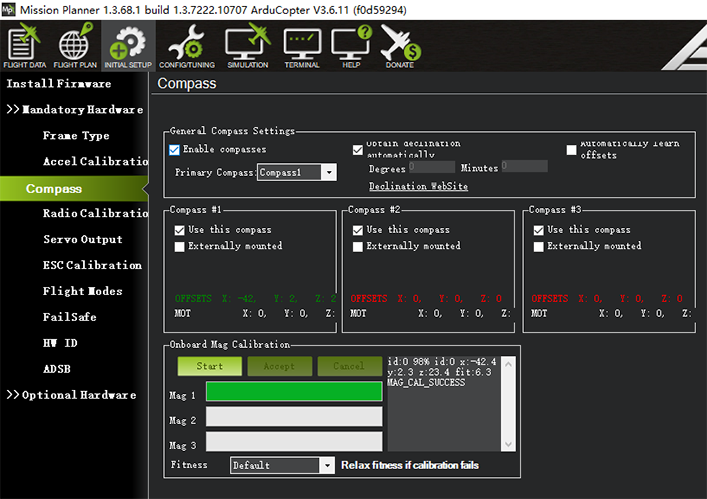
指南针#1是GPS外置罗盘,“外部安装”的勾要选起来,一定要选择NONE,不可以选其他。
-
指南针#2 是飞控内置罗盘,“使用这个指南针”的勾不选起来,就是只使用外置罗盘,不使用内置罗盘
-
之后点
开始按钮

-
如果您的自动驾驶仪装有蜂鸣器,您应该听到一声提示音,然后每秒发出一声短促的哔哔声
-
将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下指向地球几秒钟
-
当无人机旋转时,绿色指示条应向右延伸得越来越远,直到校准完成
-
成功完成后,将发出三声提示音,并出现“请重新启动自动驾驶仪”窗口,切换到其它界面再切换回本界面,查看校准得到的偏移值,如果偏移值为绿色则表示良好(每项偏移量的绝对值<400);黄色为尚可接受(每项偏移量的绝对值<600);红色为且不为零(可能存在磁场干扰)
- 校准完成后,需要重新插拔usb线,重新连接
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号