



















lighthouse定位系统入门教程-单机螺旋上升直线下降
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
-
介绍如何实现单台无人机的单机螺旋上升直线下降
-
本文基于无人机多机套件主机测试
-
Crazyflie无人机集群套件,采购地址
仿真飞行:
- 生成螺旋上升轨迹的点坐标的脚本
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 参数设置
height = 1 # 螺旋上升的总高度
num_points = 45 # 坐标点数量
radius = 0.3 # 螺旋半径的一半,宽度为0.5米
turns = 2 # 螺旋圈数
# 生成三维坐标点
z = np.linspace(0, height, num_points)
theta = np.linspace(0, 2 * np.pi * turns, num_points)
x = radius * np.cos(theta) + 0.3
y = radius * np.sin(theta)
# 将坐标点写入文件
with open('spiral_coordinates.csv', 'w') as f:
for xi, yi, zi in zip(x, y, z):
f.write(f'{xi},{yi},{zi}\n')
# 绘制螺旋图像
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.plot(x, y, z)
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
ax.set_title('3D Spiral')
plt.show()-
生成轨迹,参考
-
进入脚本目录
roscd crazyswarm/scripts/- 脚本代码
#!/usr/bin/env python
import numpy as np
from pycrazyswarm import *
import uav_trajectory
if __name__ == "__main__":
swarm = Crazyswarm()
timeHelper = swarm.timeHelper
allcfs = swarm.allcfs
traj1 = uav_trajectory.Trajectory()
traj1.loadcsv("spiral_coordinates.csv")
TRIALS = 1
TIMESCALE = 1.0
for i in range(TRIALS):
for cf in allcfs.crazyflies:
cf.uploadTrajectory(0, 0, traj1)
allcfs.takeoff(targetHeight=0.1, duration=2.0)
timeHelper.sleep(2.5)
for cf in allcfs.crazyflies:
pos = np.array(cf.initialPosition) + np.array([0.2, 0, 0.1])
cf.goTo(pos, 0, 2.0)
timeHelper.sleep(2.5)
allcfs.startTrajectory(0, timescale=TIMESCALE)
timeHelper.sleep(traj1.duration * TIMESCALE + 2.0)
allcfs.land(targetHeight=0.06, duration=10.0)
timeHelper.sleep(10.0)- 运行脚本
python3 spiral_coordinates.py --sim- 启动后,无人机起飞0.1米,螺旋上升1米,然后直线下降
真机飞行
-
1号无人机放置在基站测试区域中心
-
通过choose.py配置无人机,打开choose.py,勾选使用1号无人机
python3 chooser.py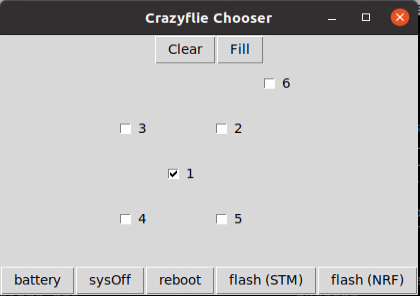
- 终端下启动launch文件
roslaunch crazyswarm hover_swarm.launch-
启动后,会弹出rviz,并显示对应的位置
-
新终端,启动脚本
python3 spiral_coordinates.py演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=1455128171&bvid=BV12i421S77Q&cid=1558704583&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号