



















lighthouse定位系统入门教程-更新固件
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何刷新固件
- 无人机crazyflie和lighthouse deck甲板固件使用版本:
2024.10-firmware-cf2-2024.10.zip - crazyradio 2.0固件使用版本:
Crazyradio 2.0 firmware version 1.1 - 在ubuntu系统下的客户端cfclient版本:
Cfclinet 2024.03 - ubuntu版本:
ubuntu 20.04 LTS - ROS1版本:
noetic - Crazyflie无人机集群套件,采购地址
更新crazyradio 2.0固件
-
crazyradio 2.0固件使用版本:
Crazyradio 2.0 firmware version 1.1 -
点击下载crazyradio 2.0固件:https://github.com/bitcraze/crazyradio2-firmware/releases/tag/1.1
更新无人机crazfylie和lighthouse deck甲板固件
-
连接crazyradio 2.0刷固件
-
lighthouse deck甲板,还没刷入固件的时候,
D13灯显示红色

- lighthouse deck甲板,成功刷入固件后,
D12灯显示橙色


- lighthouse deck甲板,成功与灯塔连接后,
D11灯显示绿色

-
点击下载crazyflie固件地址:https://github.com/bitcraze/crazyflie-release/releases?page=2,选择
2024.10-firmware-cf2-2024.10.zip版本(cf2是Crazyflie 2.X),选择zip文件,其中包含Crazyflie 2.0的nRF51和STM32F405的固件(aideck_esp.bin,cf2-2014.10.bin,cf2_nrf-2014.bin,lighthouse.bin,mainifest.json,sd130_bootloader-2014.10.bin)。 -
正常启动crazyflie无人机。在终端上输入命令,打开cfclient客户端
cfclient
-
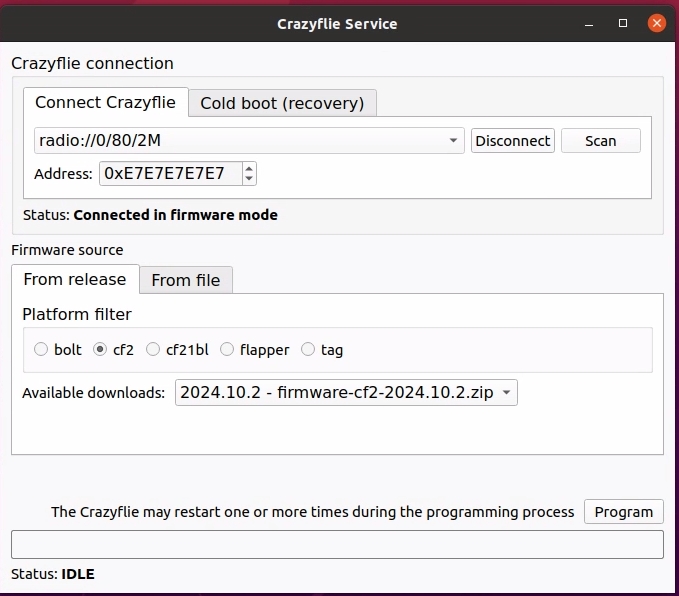
进入firmware模式
- 菜单
connect->Bootloader - 点击
Connect Crazyflie - 点击
Scan,扫描 - 点击
Connect,连接 - 看到
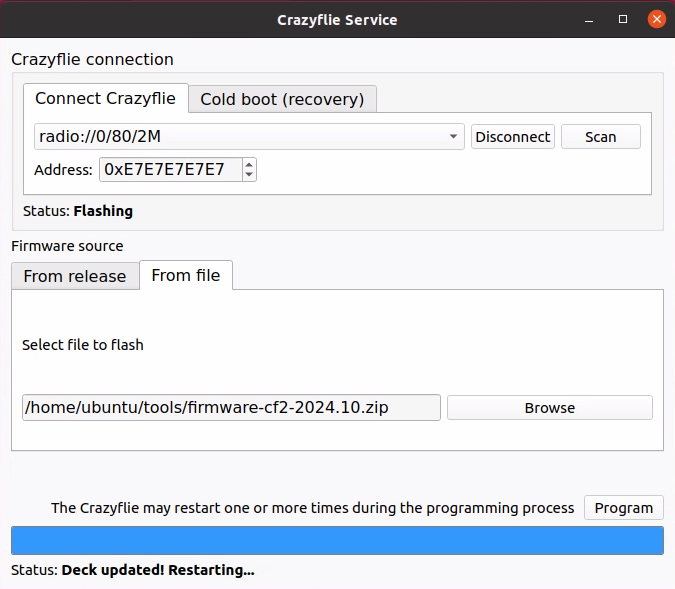
Status: Connected in firmware source,说明已经连接成功 - 选择固件文件
2024.10-firmware-cf2-2024.10.zip - 点击
Program,更新固件 - 连接crazyflie后,在
Tabs->Console中查看固件版本
- 菜单
演示视频:在windows系统下,crazyradio 2.0刷入固件
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113586819105218&bvid=BV1smzCYME97&cid=27156024440&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>演示视频:crazyflie无人机在ubuntu系统下刷固件1
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113586684822833&bvid=BV1gvzCYjERY&cid=27155500613&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>演示视频:crazyflie无人机在ubuntu系统下刷固件2
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113586684825185&bvid=BV1gvzCYjEHS&cid=27155564348&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号