



















lighthouse定位系统入门教程-配置基站通道(4个基站)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何设置4个基站
- 由于Lighthouse定位系统基于红外光和激光进行定位。如果部署环境中存在其他红外光束,可能会导致定位失败。
- Crazyflie无人机集群套件,采购地址
所需场景
- 标准场景为:4米 X 4米 X 2米
第一步:打开cfclient
- cfclient是crazyswam的调试程序,可以通过cfclient对无人机进行固件烧录、通道设置、定位系统校准、日志查看等功能。
- 在终端中打开cfclient
cfclient
- 效果图:
-
通过Set BS Channel,分别设置基站的频道1-4
-
添加灯塔V2设备权限
sudo chmod 777 /dev/ttyACM0-
点击菜单栏“Lighthouse Positioning”,点击“Set BS channel”
-
弹出配置方框,点击“Scan basestation”,扫描lighthouse V2灯塔设备

- 修改“Change channel”灯塔频道的值
第二步:放置基站
- 配置基站ID后,接好基站支架,把四个基站放置在四个角,围成一个四方形,升到最大高度。四方形大小控制在6x6米内
- 保持基站方向朝下向着四方形中心位置。
第三步:设置好通信地址,并且将飞机放在一个起始位置。
-
无人机机号设置,默认1号无人机设置为0xE7E7E7E701,2号为0xE7E7E7E702....10号飞机为E7E7E7E70A。如果有更多则根据16进制继续加1,如15号飞机为0xE7E7E7E70E,16号飞机为0xE7E7E7E710,17号为0xE7E7E7E711。。。。
-
无人机设置成功后,需要重启无人机才生效
-
首先将选择好的无人机放在灯塔定位环境中,最好是中间位置。此位置是将来坐标系的(0,0,0)点,即起始位置。 此外,无人机的正前方是坐标系的X轴正方向,正左方是Y轴正方向,正上方是Z轴正方向。
-
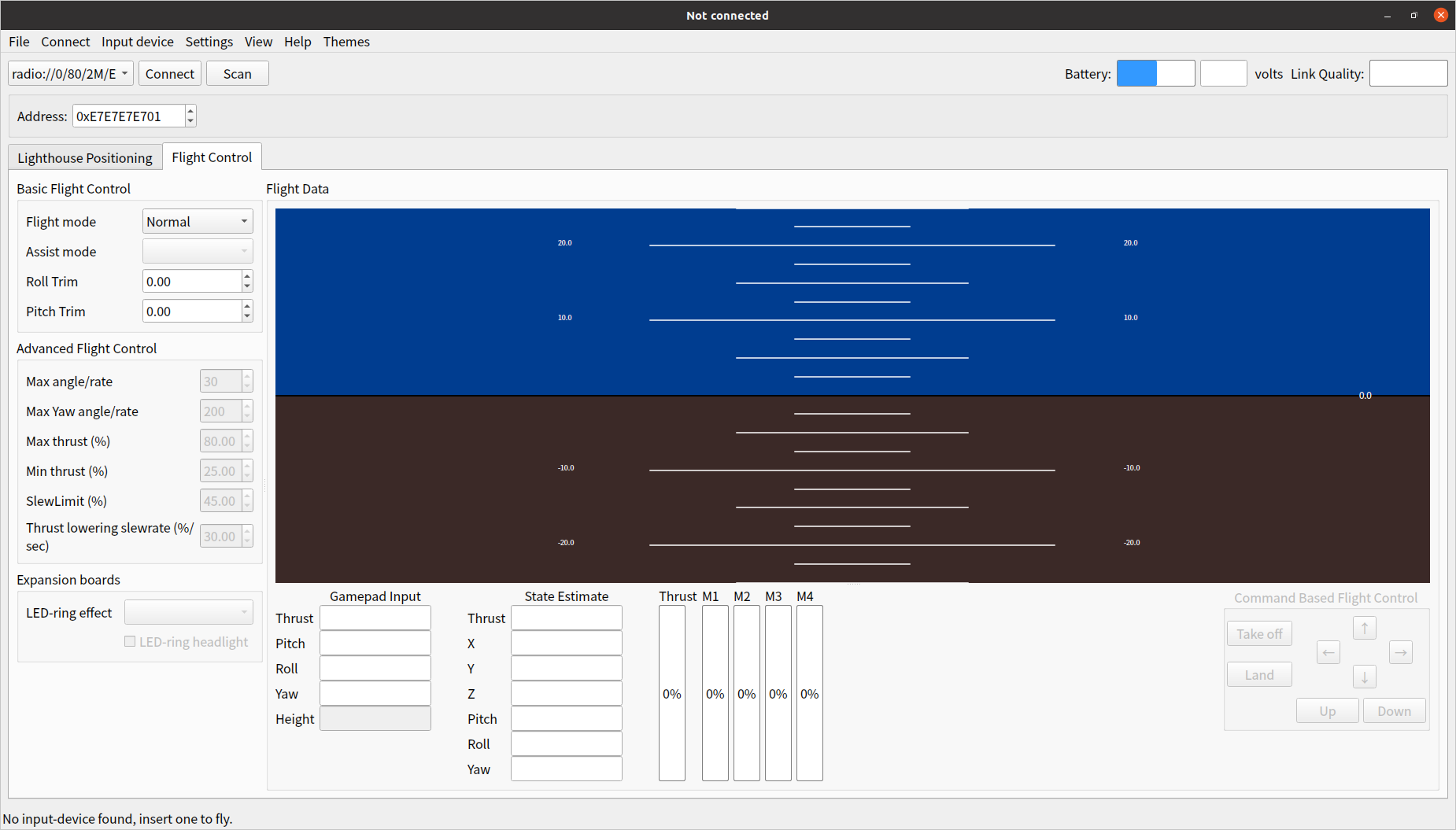
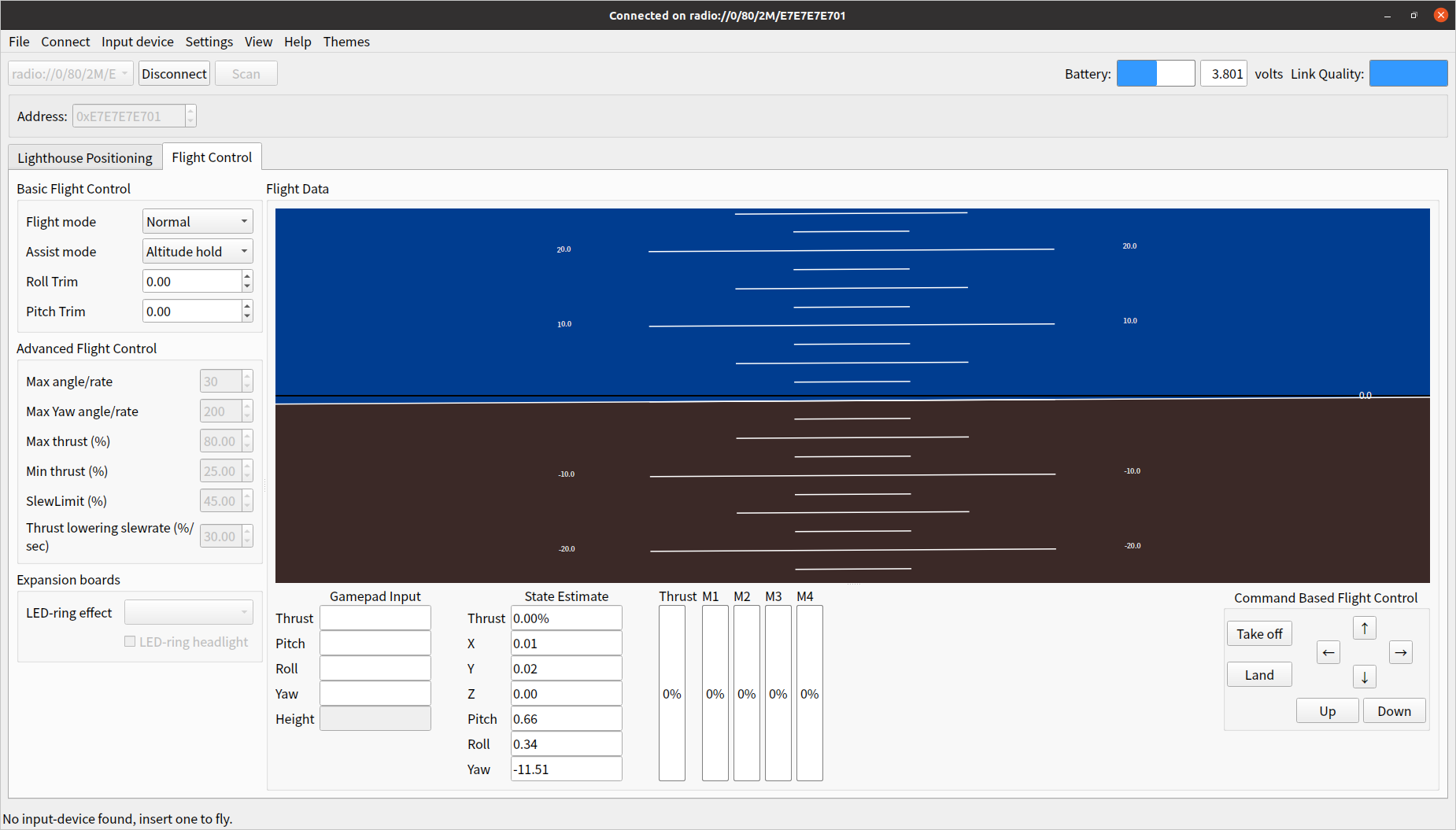
设置好通信地址,点击scan进行扫描。如果一次没有扫描到,请进行多次扫描,扫描到无人机后,点击Connect进行连接。
-
正确连接后如图:
第四步:打开Lighthouse界面
- 在cfclient中选择Lighthouse Positioning标签。
- 效果图1:
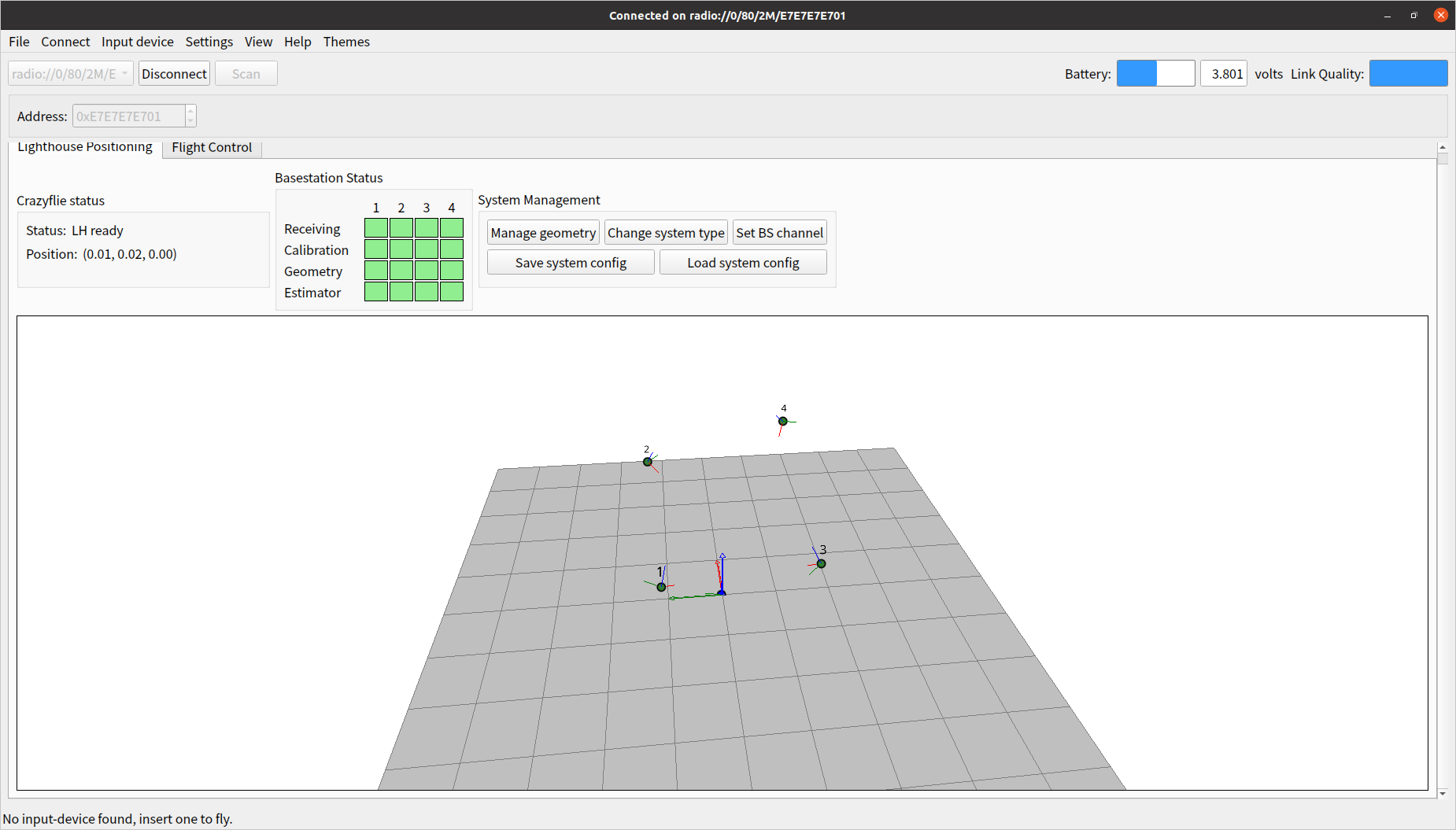
- 效果图2:

- 1:点击Manage geometry打开管理页面。
- 2:点击Esrumate Geometry 开始估计基站位置。
第五步:校准!
- 1.打开校准程序将无人机放在一个你要建立坐标的原始位置
- 效果图:

- 点击 Start Measurement开始测量。
- 测量完成后效果图:

-
点击“Next”
-
如果是4个基站,但如果在校准过程中,只检测到了2个及以上基站,即可进行下一步操作。
-
2.将无人机向正前方移动1米的距离
-
注意:此处请通过卷尺量出1米的距离,将飞机放在正前方(X轴)的位置,此位置直接决定该坐标系下1米的距离,对定位极其关键,请务必确保放置正确。
-
效果图:

- 点击Start Measurement进行位置估计,估计完成后如下图所示:

-
点击Next进行下一步。
-
3 将无人机放在其他地方,以做标记。(此步骤可以重复多次,多测试一些点)
-
点击Start Measurement进行位置估计,估计完成后如下图所示:

- 如下图所示,如果确认可以检测到基站后,点击Next按钮。

-
注意 该位置用于将XY平面映射到地面。(通过原点,X轴1米距离,以及此点可以定义平面) 此处可以通过Add more measurements添加更多的点,来获得更精准的定义。
-
4 设置一个时间,用来对位置进行采集。点击start之后,手持无人机在lighthouse系统下进行多方位移动,直到计时结束。
-
注意避免移动过快,尽量覆盖所有飞行空间。

- 倒计时结束后,如下图:

-
检测完成后,点击Next按钮,进行下一步。
-
5 使用lighthouse系统进行基站位置估计,如果看起来合理,则点击“Finish”,否则重新进行估计。
-
点击Estimeta Geometry按钮进行估计:

- 估计之后如下图:

-
估计出来的是基于原点的4个基站的x,y,z,单位是米。如果和实际偏差很大,则需要重新校准。如果位置准确,则点击Finish按钮。
-
6.将校准后的参数写入无人机,点击“write”

第六步:给其他无人机进行校准
-
经过以上步骤,就可以对无人机进行校准,但是这样只校准了一架。如果要给每个飞行都执行一遍,这将是一个很麻烦的过程。那么如何给多个无人机进行系统校准呢?那就是将校准好的参数保存下来,写入其他的飞机里面 ,我们也推荐这样做,这样可以确保您所有的飞机在同一个坐标系下建立。
-
校准完成后,将参数保存下来,命名为lighthouse.yaml。该命名可以根据自己喜好更改,但是要确保将参数保存下来。如果你校准完忘了更改,没有关系,当你再次连接校准好的飞机的时候,你仍然可以保存。
-
- lighthouse.yaml的内容如下。请核对文件的内容,确认是否缺少参数
calibs:
0:
sweeps:
- curve: 0.18115234375
gibmag: -0.004360198974609375
gibphase: 1.4453125
ogeemag: 0.137451171875
ogeephase: 0.99853515625
phase: 0.0
tilt: -0.05035400390625
- curve: 0.41650390625
gibmag: -0.005382537841796875
gibphase: 1.5810546875
ogeemag: 0.1387939453125
ogeephase: 1.9638671875
phase: -0.0033245086669921875
tilt: 0.043548583984375
uid: 2800813957
1:
sweeps:
- curve: -0.03271484375
gibmag: 0.00641632080078125
gibphase: 1.490234375
ogeemag: -0.52880859375
ogeephase: 1.52734375
phase: 0.0
tilt: -0.0474853515625
- curve: 0.2109375
gibmag: 0.006160736083984375
gibphase: 2.673828125
ogeemag: -0.412841796875
ogeephase: 2.009765625
phase: -0.004711151123046875
tilt: 0.04425048828125
uid: 2936131157
2:
sweeps:
- curve: 0.07330322265625
gibmag: -0.0147247314453125
gibphase: 1.74609375
ogeemag: 0.74853515625
ogeephase: 1.8046875
phase: 0.0
tilt: -0.049957275390625
- curve: 0.462646484375
gibmag: -0.01454925537109375
gibphase: 2.39453125
ogeemag: 0.7138671875
ogeephase: 2.453125
phase: -0.00044274330139160156
tilt: 0.048004150390625
uid: 249337311
3:
sweeps:
- curve: 0.2890625
gibmag: 0.0026836395263671875
gibphase: 0.79345703125
ogeemag: -0.38525390625
ogeephase: 0.9697265625
phase: 0.0
tilt: -0.051727294921875
- curve: 0.54052734375
gibmag: 0.0014162063598632812
gibphase: 1.5439453125
ogeemag: -0.2509765625
ogeephase: 1.7939453125
phase: 0.0026340484619140625
tilt: 0.04931640625
uid: 353353001
geos:
0:
origin:
- -1.0737802982330322
- -0.8519091606140137
- 1.9074923992156982
rotation:
- - 0.3629595637321472
- -0.4330469071865082
- 0.8250640630722046
- - 0.4424401819705963
- 0.8593602776527405
- 0.2564108967781067
- - -0.8200652599334717
- 0.27197471261024475
- 0.5035104155540466
1:
origin:
- -0.8002750277519226
- 0.8843321204185486
- 1.9042388200759888
rotation:
- - 0.5369356274604797
- 0.43011340498924255
- 0.7257428169250488
- - -0.21536865830421448
- 0.901649534702301
- -0.37502601742744446
- - -0.8156693577766418
- 0.04506256803870201
- 0.5767606496810913
2:
origin:
- 1.703188419342041
- -0.739931046962738
- 1.9295449256896973
rotation:
- - -0.43310773372650146
- -0.42148035764694214
- -0.7967258095741272
- - 0.1961837261915207
- -0.906822144985199
- 0.3730757236480713
- - -0.8797327280044556
- 0.00527734961360693
- 0.47543928027153015
3:
origin:
- 1.5375837087631226
- 0.7564433217048645
- 1.9208470582962036
rotation:
- - -0.6103970408439636
- 0.19327202439308167
- -0.768154501914978
- - 0.24711370468139648
- -0.8749092817306519
- -0.41649559140205383
- - -0.7525624632835388
- -0.4440491795539856
- 0.4862818717956543
systemType: 2
type: lighthouse_system_configuration
version: '1'-
然后断开飞机,使用cfclient连接另外的飞机,
-
1:打开lighthouse界面,将保存的参数上传到该飞机上。加载文件后,参数就自动写入
-
2:通过flight control页面,对飞机进行试飞。
-
如果飞行稳定,则重复执行以上1,2步,直到将所有飞机的参数都刷完。
演示视频:crazyflie无人机连接lighthouse v2定位器灯塔
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113627638072048&bvid=BV11aq3Y3Ebt&cid=27270512891&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>演示视频:在Crazyflie客户端上校准并测量lighthouse基站的位置
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113627638006173&bvid=BV1saq3Y3Edv&cid=27270450464&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号