



















lighthouse定位系统入门教程-通过cfclient测试飞行
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何通过cfclient
- Crazyflie无人机集群套件,采购地址
测试飞行
- 打开cfclient客户端,假设连接1号无人机
cfclient
- 在右上角的address处输入0xE7E7E7E701,点击scan,查找到对应无人机,选择对应1号无人机,再点connect
- 效果图:
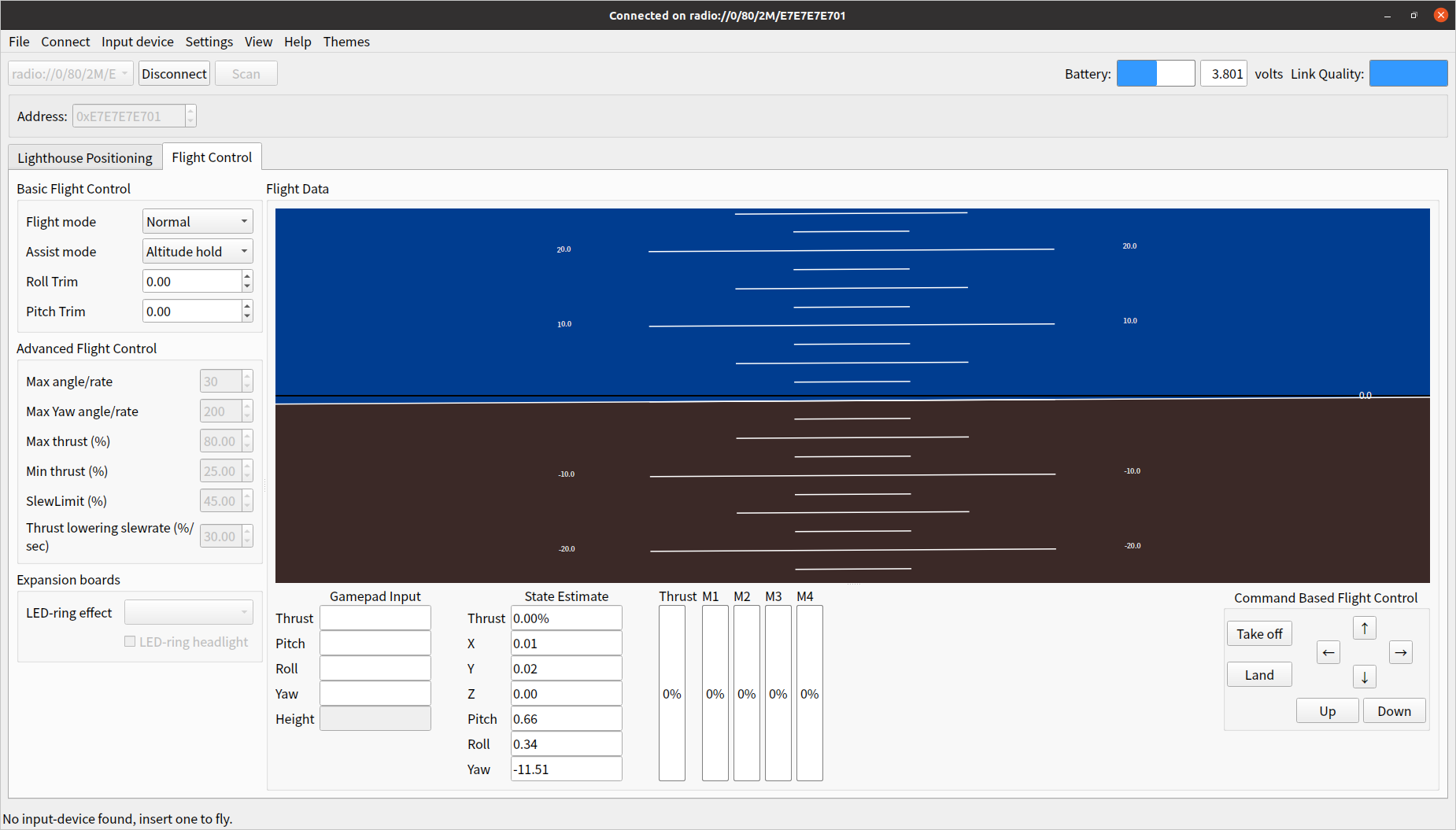
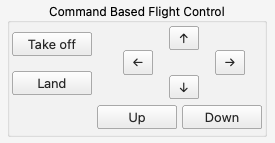
- 通过点击右下角的控制工具,点击take off实现起飞
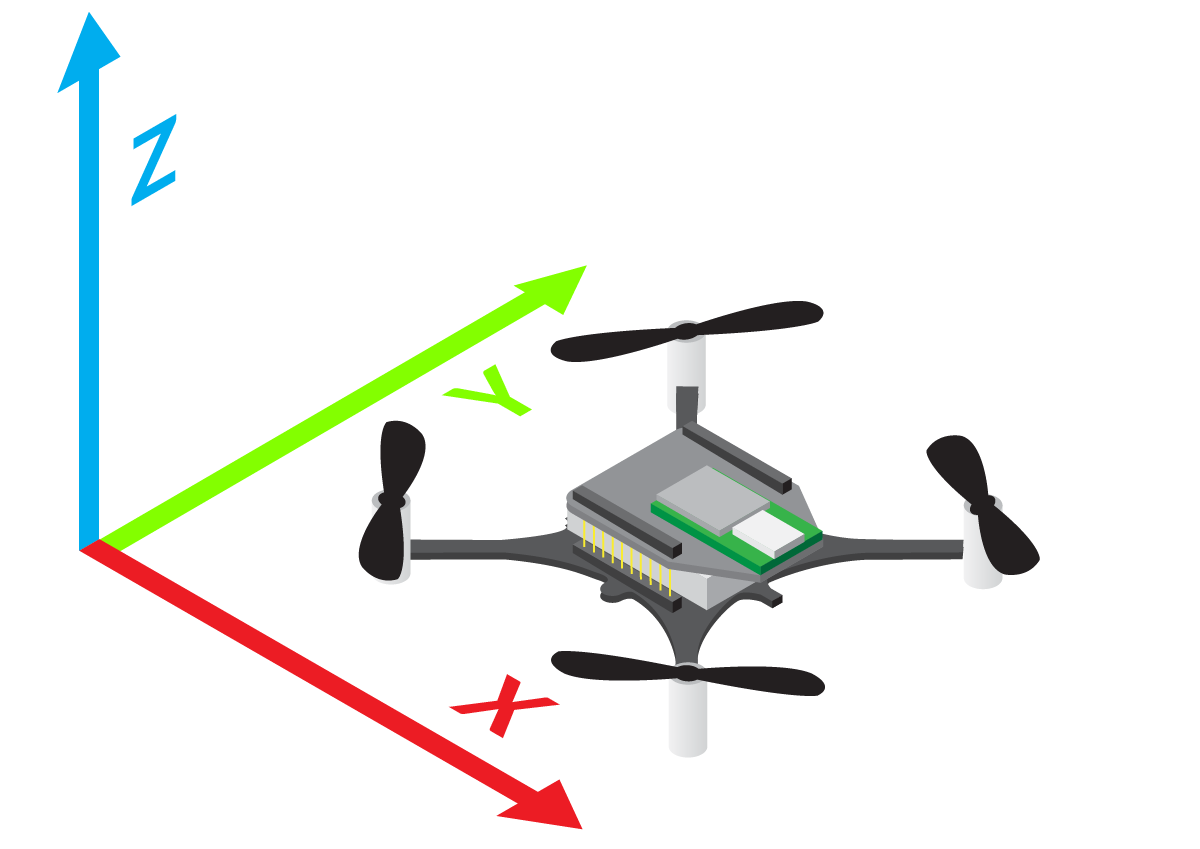
- 在State Estimate处查看无人机的相关信息,xyz位置,RRY值
- 通过点击land实现降落
- 通过点击按钮可以实现前后左右的稳定飞行
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=1304697945&bvid=BV11M4m1r7DZ&cid=1547267677&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号