



















lighthouse定位系统入门教程-测试单台无人机8字飞行
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何实现单台无人机的8字飞行
- 本文基于无人机多机套件主机测试
- Crazyflie无人机集群套件,采购地址
仿真飞行
- 进入脚本目录
roscd crazyswarm/scripts/- 运行脚本
python3 figure8_csv.py --sim- 启动后,无人机起飞并做8字飞行
真机飞行
-
1号无人机放置在基站测试区域中心
-
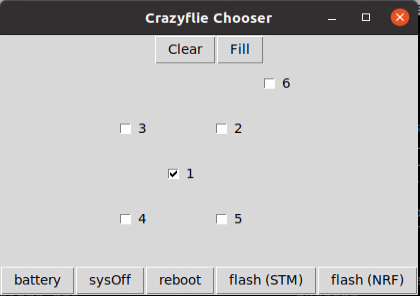
通过choose.py配置无人机,打开choose.py,勾选使用1号无人机
python3 chooser.py- 效果图:
- 终端下启动launch文件
roslaunch crazyswarm hover_swarm.launch- 启动后,会弹出rviz,并显示对应的位置
- 新终端,启动脚本
python3 figure8_csv.py- 无人机会自动起飞,实现8字飞行
演示视频:在lighthouse系统中实现一架无人机进行8字飞行
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=1754678688&bvid=BV1Yt421M7J8&cid=1547272589&p=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号