



















ROS2与Open-RMF仿真教程#Jazzy版#-Traffic Light Robot 场景示例
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 本教程主要介绍Open-RMF运行Traffic Light Robot场景示例
- 测试环境:
Ubuntu 24.04+ROS2 Jazzy+Gazebo Harmonic 8.9.0
背景介绍
Open-RMF还可以管理API或队列管理器仅提供暂停和恢复命令来控制机器人的队列,此类队列被归类为traffic_light- 为了集成
traffic_light队列,用户需要traffic_light基于此API实现一个队列适配器 - 该
rmf_demos包含各种场景下traffic_light示例 - 在
mock_traffic_light这些示例中使用了一个简化的适配器
操作步骤
Triple-H 场景
- 新开终端,打开
Triple-H仿真场景
$ ros2 launch rmf_demos_gz triple_H.launch.xml- 启动脚本
$ ros2 launch rmf_demos the_pedigree.launch.xml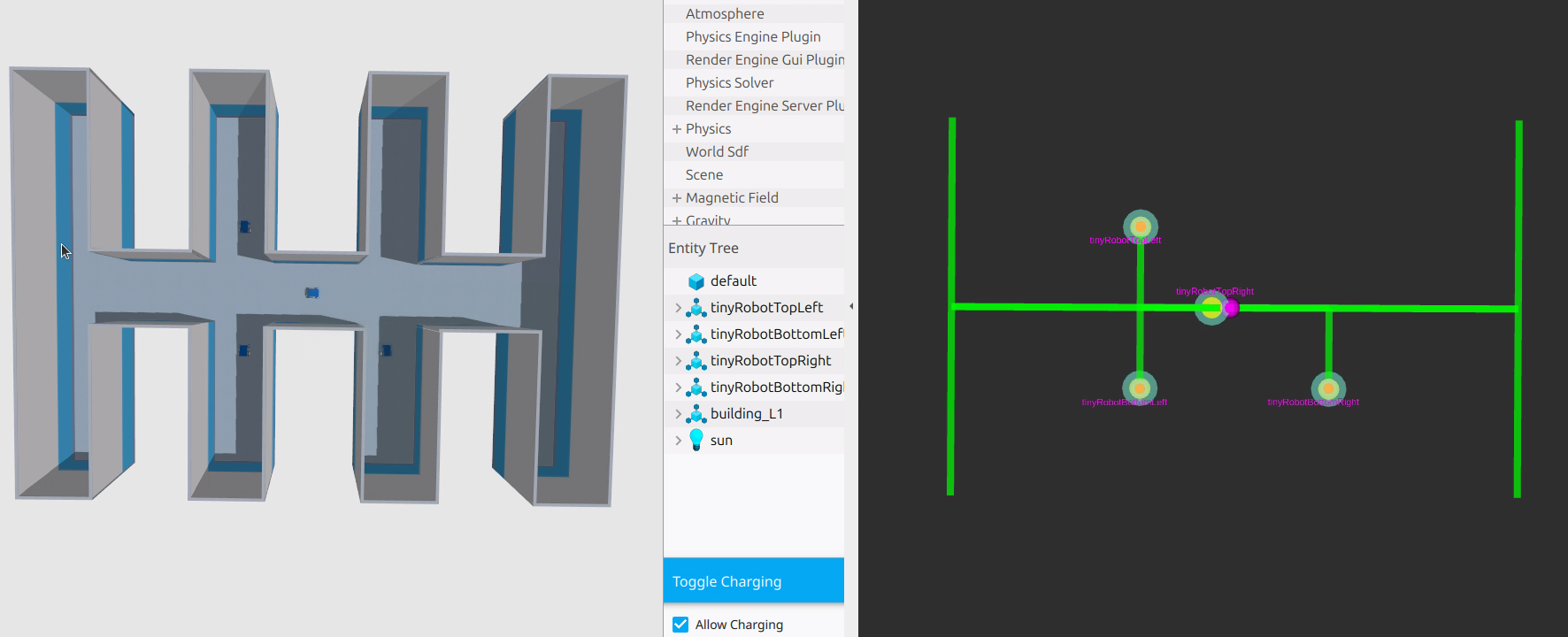
Battle Royale 场景
- 新开终端,打开
Battle Royale仿真场景
$ ros2 launch rmf_demos_gz battle_royale.launch.xml- 启动脚本
$ ros2 launch rmf_demos battle_go.launch.xml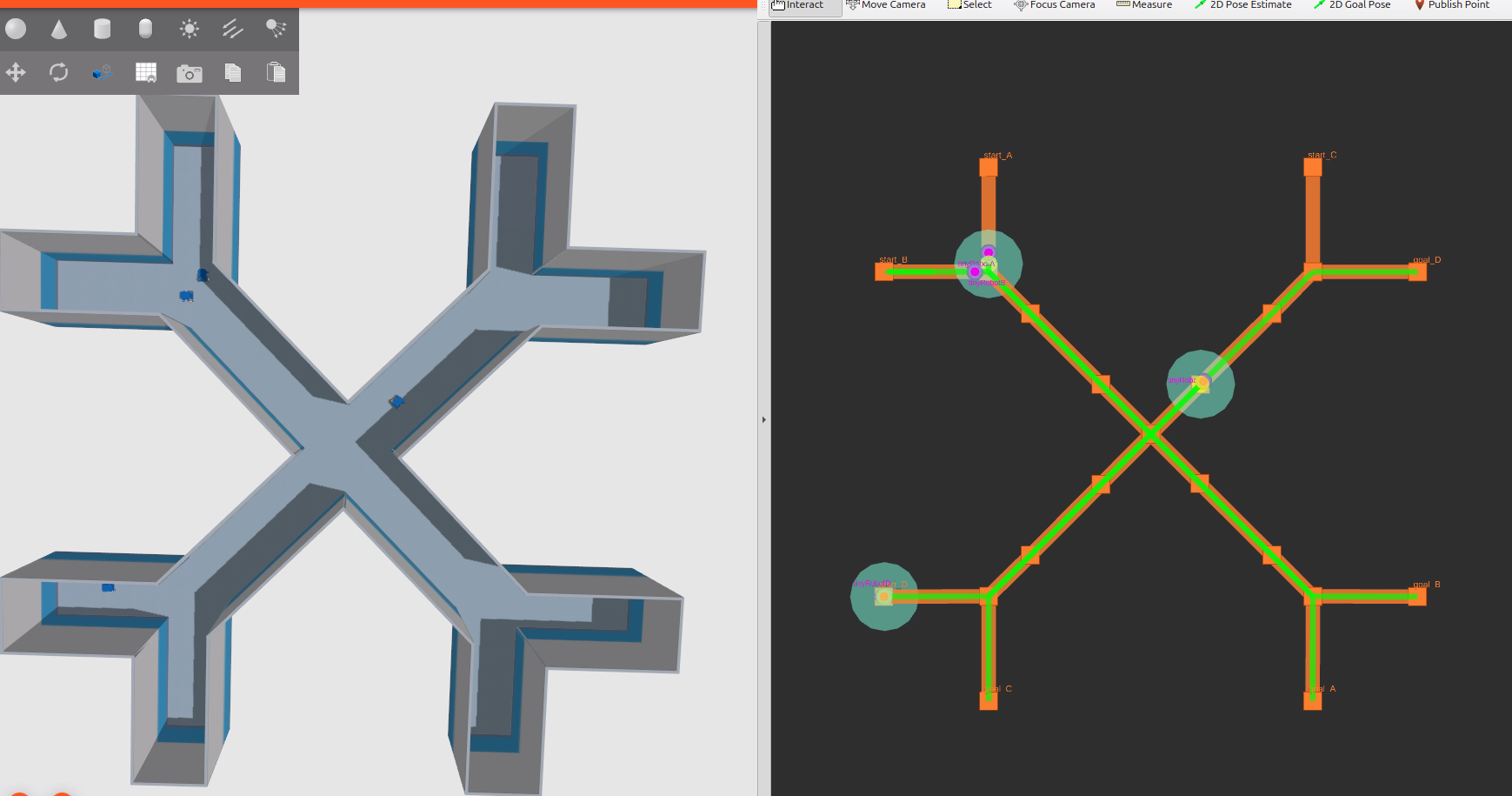
Office 场景
- 新开终端,打开
Office仿真场景
$ ros2 launch rmf_demos_gz office_mock_traffic_light.launch.xml- 启动脚本
$ ros2 launch rmf_demos office_traffic_light_test.launch.xml
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号