



















Turtlebot2i入门教程-目录
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turtlebot2i入门教程-目录
介绍:
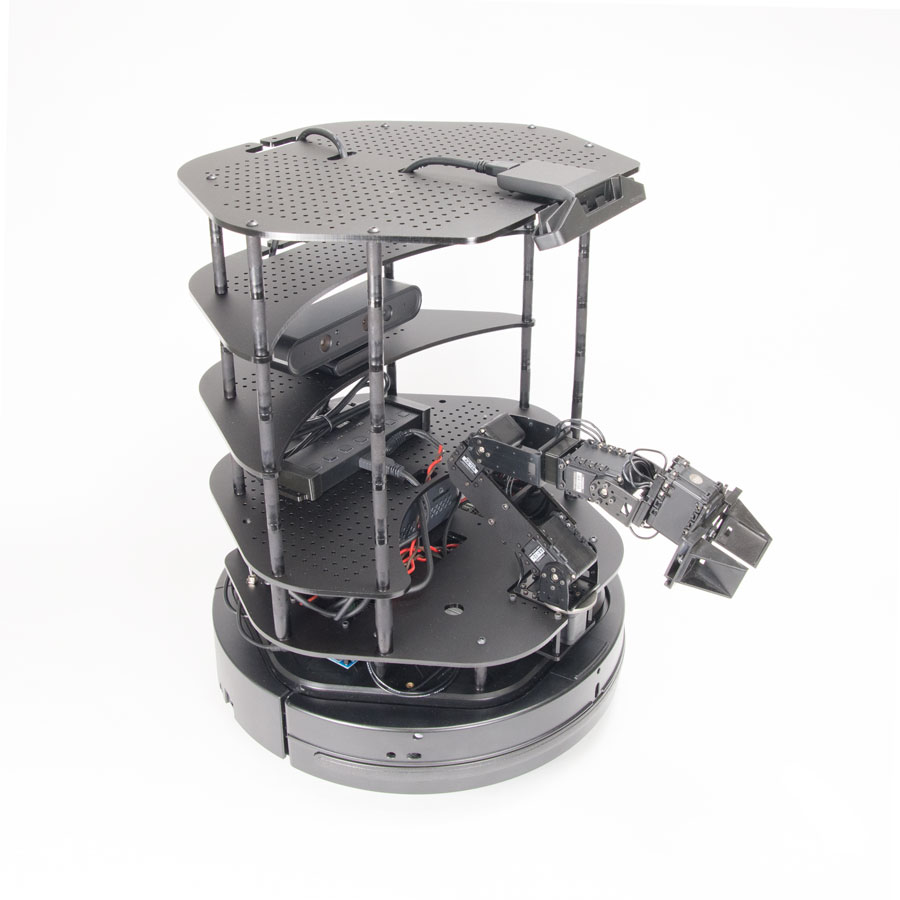
- Turtlebot2i是turtlebot2+turtlebot_arm结合的产品
- 具有自主导航和基本的抓放功能。
- 可以实现在指定地点抓起物件并导航到指定点放下物件
- Turtlebot2i改进前一个版本的交互方式,增加机械臂支持,重新设计的底盘
- 提供Pincher MK3 4自由度机械臂作为标准选项,允许机器人与现实世界中的小物体进行交互,
- 将TurtleBot转变成一个非常有能力的移动机械臂。
- Arbotix-M Robocontroller为Pincher Mk3机械臂提供接口
- 这是使用MoveIt这一开源的反向运动学解决方案实现的,允许用户使用高级命令来控制臂。
目录:
- Turtlebot2i入门教程-目录
- Turtlebot2i入门教程-硬件
- Turtlebot2i入门教程-软件
- Turtlebot2i入门教程-安装
- Turtlebot2i入门教程-启动
- Turtlebot2i入门教程-遥控
- Turtlebot2i入门教程-导航
- Turtlebot2i入门教程-建图
- Turtlebot2i入门教程-物体检测
- Turtlebot2i入门教程-对象交互和颜色分类
- Turtlebot2i入门教程-自动充电
- Turtlebot2i入门教程-网页控制
- Turtlebot2i入门教程-命令集
- Turtlebot2i入门教程-远程控制
- Turtlebot2i入门教程-问题集
图示:
视频:
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号