



















Turtlebot3自动驾驶入门教程-场景搭建
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍如何搭建与Turtlebot3自动驾驶配套使用的场景
场地
-
由于Turtlebot3测试自动驾驶受环境光线影响较大,所以测试环境应该设置在室内,且尽量保证早晚的环境光线保持一致
-
场地应该采用深色平坦,不能太过光滑的背景,建议背景色为黑色
-
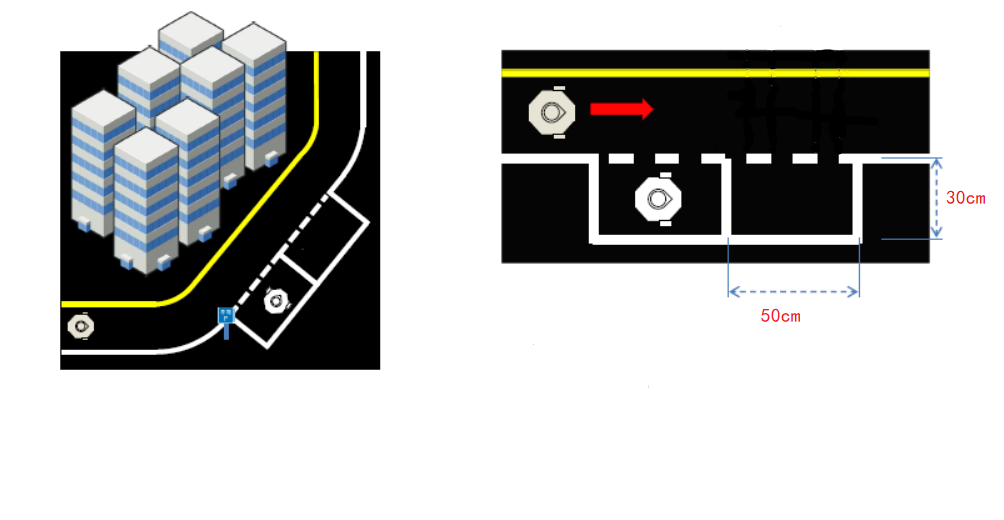
下图是测试时搭建的场景

车道
-
车道主要由两条车道线组成,基于机器人的位置判定,左边为黄色车道线,右边为白色车道线
-
建议黄色车道线与白色车道线的距离设置为25cm
-
车道线的宽度为2cm或3cm
-
参考图

停车位
-
停车位上的停车虚线段长度在2cm或3cm
-
每两段停车虚线段之间的距离不适宜太远,要确保进行停车时,topic:
/detect/image_parking上的摄像头检测到多个停车虚线段 -
参考图
交通灯
- 交通灯可以用红黄绿三种LED灯来代替,或者使用自行车青蛙灯
交通杆
-
交通杆的制作可以使用三片红色的纸片或丝带
-
建议色块大小为长4cm,宽2cm,两色块相距4cm
-
交通杆应该放置在与摄像头水平的位置
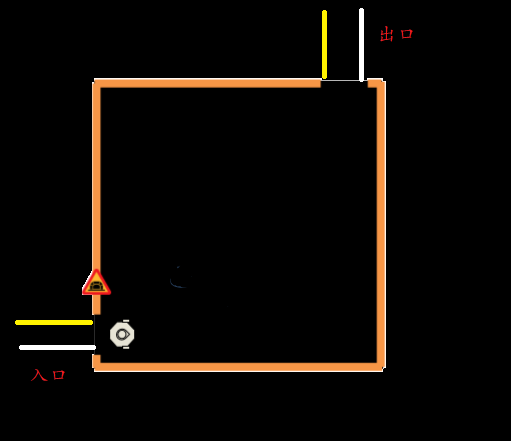
隧道
-
隧道入口和出口的宽度应该大于车道的宽度,大约为30cm
-
隧道可以使用木板或纸箱等高于25cm的物品围起来,只留出入口
-
隧道出口一般设置在整个自动驾驶流程的起点处
-
参考图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流