



















ROS2与Turbot3-Multi仿真教程-多机跟随
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何在ROS2仿真进行多机跟随测试
- 测试环境:
Ubuntu 24.04+ROS2 Jazzy+Gazebo Harmonic
相关设备
- Turbot3-Multi套件: 采购地址
操作步骤
- 新开终端,启动gazebo,且加载empty环境
$ ./sim_scripts/sim_gazebo.sh world:=empty- 新开终端,默认机器人到gazebo上
# 亦可指定机器人数量为3台、6台和10台
$ ./sim_scripts/sim_multi_robots.sh 3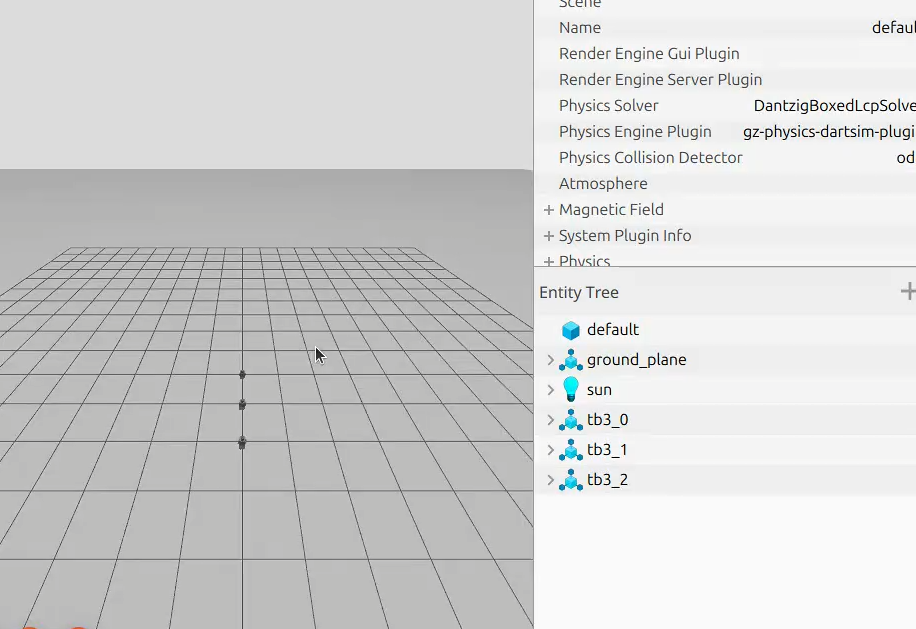
- 启动多机跟随脚本
$ ./sim_scripts/sim_multi_follow.sh演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=114478561625550&bvid=BV1CfVSzAEy6&cid=29876355390&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流