



















Turtlebot4入门教程-软件-Nav2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

Turtlebot4入门教程-软件-Nav2
说明:
- 介绍Turtlebot4的导航包
相关设备:
- Turtlebot4机器人套件:采购地址
Nav2
- Nav2 是 ROS2 中的官方导航栈。
- Nav2 可用于通过使用其周围环境的地图来计算和执行机器人的行进路径。
- 地图可以在启动时加载,也可以在导航时使用 SLAM 生成。
启动文件:
Nav Bringup: Launches Nav2 nodes, with the option to launch SLAM or Localization as well.Parameters
nav2: Whether to launch Nav2 nodes.
options: [true, false]
default: true
slam: Launch SLAM along with Nav2.
options: [off, sync, async]
default: off
localization: Launch localization with an existing map
options: [true, false]
default: false
map: Path to existing map.
default: /path/to/turtlebot4_navigation/maps/depot.yaml
params_file: Full path to parameter file for Nav2 and localization nodes.
default: /path/to/turtlebot4_navigation/config/nav2.yamlConfiguration
- 可以在此处找到默认的 TurtleBot 4 配置。
- 它是来自 Nav2 github 的默认配置的略微修改版本。
- 配置文件允许用户修改参数,例如路径时的速度、机器人的半径、成本图更新频率和分辨率等。
- 有关更多信息,请阅读 Nav2 配置指南。
Examples
- 使用同步 SLAM 启动 Nav2:
ros2 launch turtlebot4_navigation nav_bringup.launch.py slam:=sync- 地图和costmaps可以在Rviz2中查看:
ros2 launch turtlebot4_viz view_robot.launch.py- 效果图
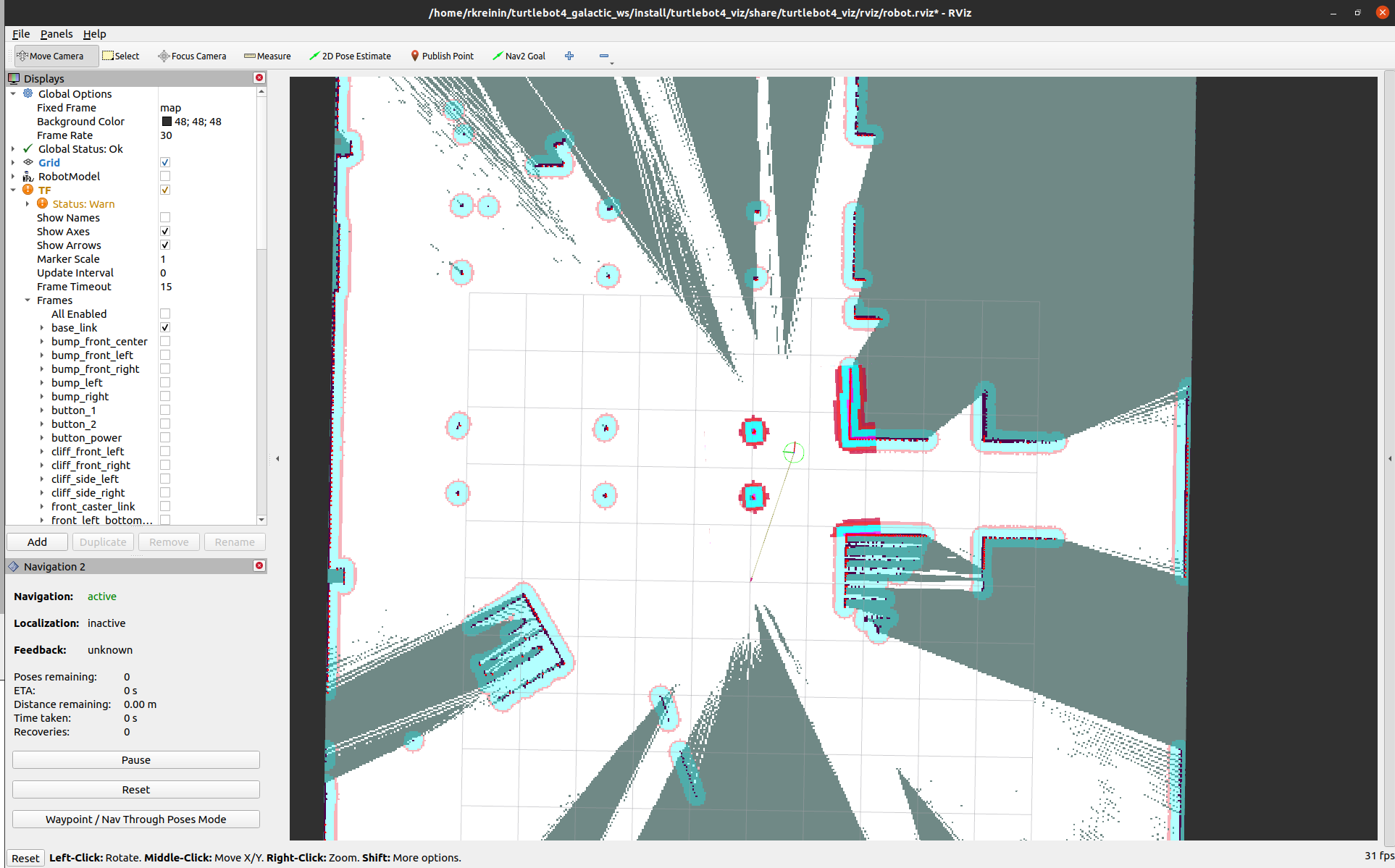
- 在地图上检测到的障碍物周围会有一个填充物,其半径等于机器人的半径。
- 导航时,Nav2 将驱动机器人离开填充区域以避免撞到障碍物。
使用 Rviz2 导航
- 设置导航目标的最简单方法是在 Rviz2 中使用 Nav2 Goal。
- 在 Nav2 运行时,选择 Rviz2 顶部的 Nav2 目标工具,然后单击地图上您要导航到的位置。
- 效果图

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流