



















Turtlebot4入门教程-演示-生成地图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

Turtlebot4入门教程-演示-创建地图
说明:
- 在本教程中,我们将通过驾驶 TurtleBot 4 并使用 SLAM 来绘制一个区域。
- 首先确保您将要绘制的区域没有不需要的障碍物。 理想情况下,您不希望人或动物在创建地图时在该区域周围移动。
相关设备:
- Turtlebot4机器人套件:采购地址
启动 SLAM
- 首先,确保 RPLIDAR 和描述节点在 TurtleBot 4 上运行。
- 然后运行 SLAM。 建议在远程 PC 上运行同步 SLAM 以获得更高分辨率的地图。
ros2 launch turtlebot4_navigation slam_sync.launch.py- 也可以使用异步 SLAM
ros2 launch turtlebot4_navigation slam_async.launch.py启动 Rviz2
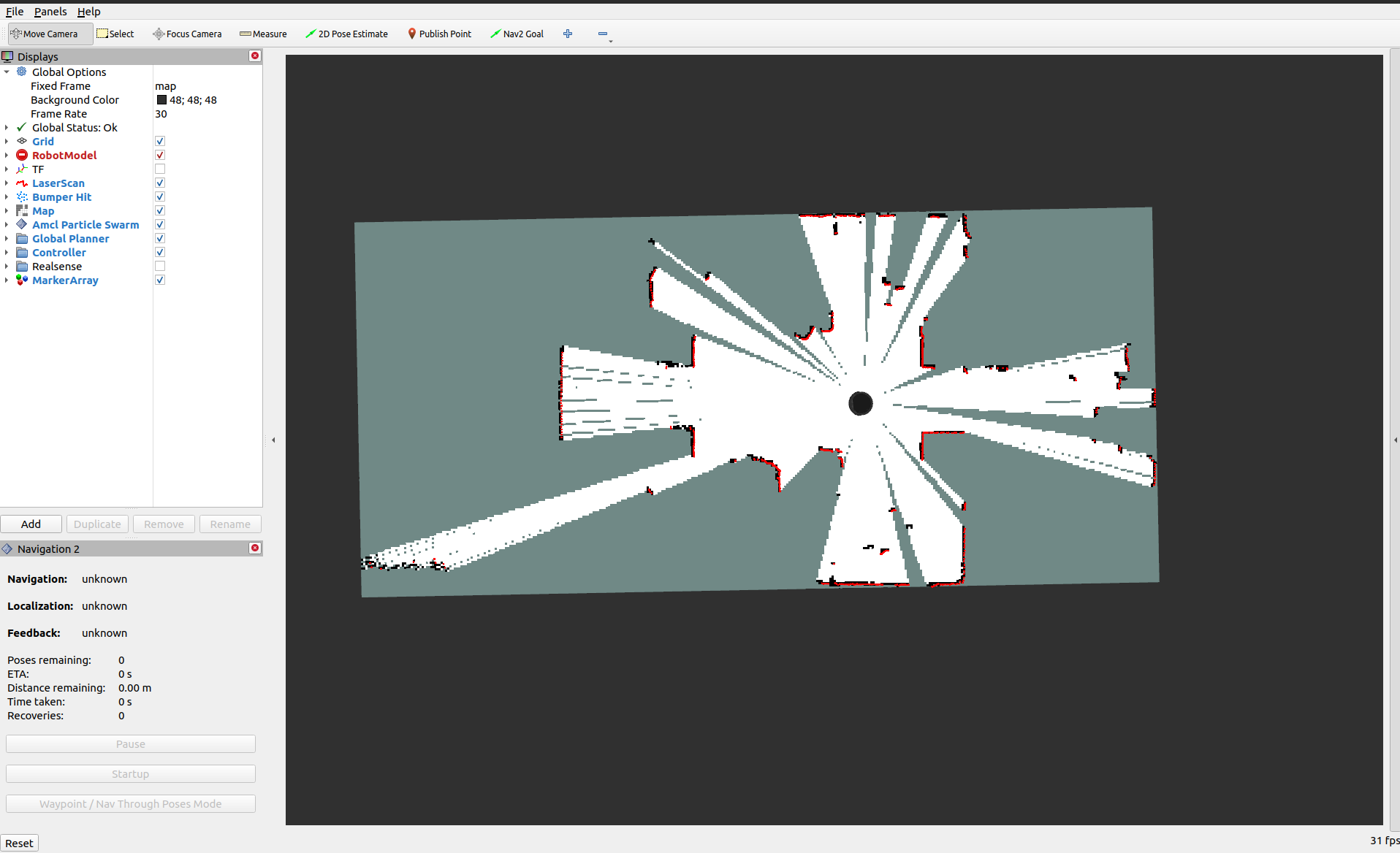
- 要可视化地图,请使用 view_robot 启动文件启动 Rviz2。
ros2 launch turtlebot4_viz view_robot.launch.py- 效果图
驾驶 TurtleBot 4
-
使用任何方法在您要映射的区域周围驱动机器人。 如果您不确定如何驾驶机器人,请查看驾驶教程。
-
当您在该区域驾驶机器人时,请留意 RVIZ,以确保正确填写地图。
-
效果图

保存地图
- 对地图感到满意后,可以使用以下命令保存它:
ros2 run nav2_map_server map_saver_cli -f map- 这会将地图保存到您的当前目录。
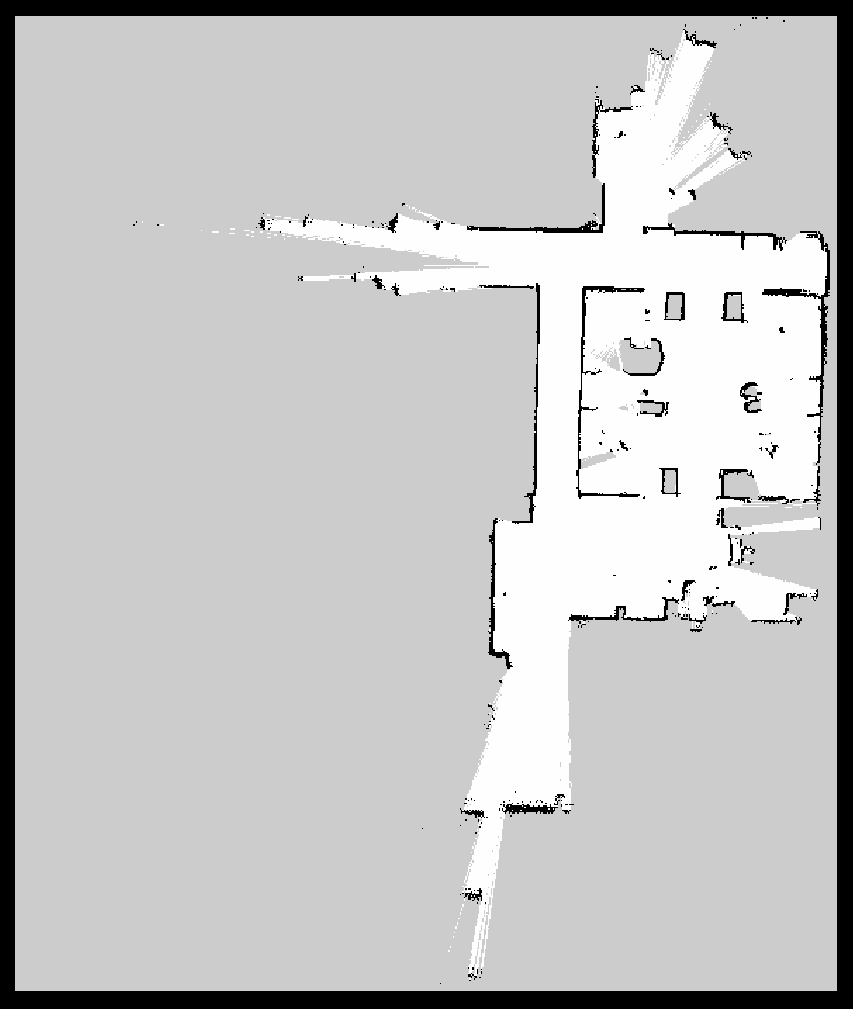
查看地图:
- 保存地图后,它将生成一个 map_name.pgm 文件,该文件可以在图像编辑器中查看。
- 还会创建一个 map_name.yaml 文件。 您可以编辑此文件以调整地图参数。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流