



















Turtlebot4入门教程-演示-控制turtlebot4
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

Turtlebot4入门教程-演示-控制turtlebot4
说明:
- 介绍如何控制turtlebot4
- 有几种方法可以让您的 TurtleBot 4 移动。
相关设备:
- Turtlebot4机器人套件:采购地址
驱动turtlebot4
- 必须先设置机器人并连接到 Wi-Fi,然后才能驱动它。 如果您还没有,请查看快速入门部分。
键盘遥控
- 让您的机器人驾驶的最简单方法是在您的 PC 上使用键盘应用程序。
- 您可以通过运行以下命令在 PC 上安装 teleop_twist_keyboard 包:
sudo apt update
sudo apt install ros-galactic-teleop-twist-keyboard- 安装后,通过调用运行节点:
source /opt/ros/galactic/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard- 这将启动一个 CLI 界面,允许您按键来命令机器人驱动。
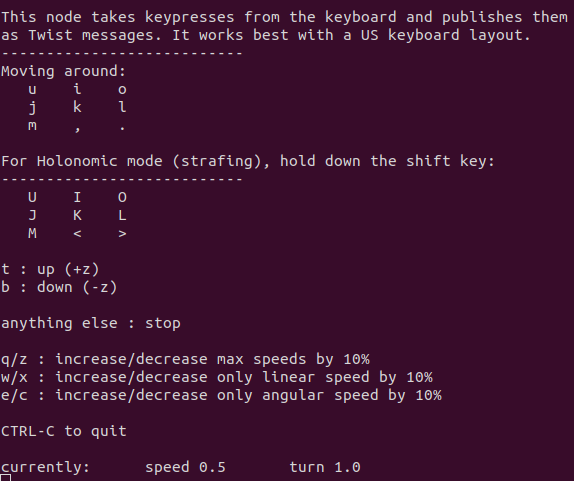
- 按 i 向前行驶,按 j 向左旋转,依此类推。 您还可以在旅途中调整线速度和角速度。
操纵杆遥控
-
如果你有 TurtleBot 4 控制器或有自己的蓝牙控制器,你可以用它来驱动机器人。
-
首先,确保您的控制器已配对并连接到机器人。 如果您有 TurtleBot 4 控制器,请按主页按钮并检查控制器的指示灯是否变为蓝色。 如果您的控制器未配对或未连接,请参阅控制器设置部分。
-
如果您使用的是 TurtleBot 4 Lite,默认情况下不会安装蓝牙包。 要安装它们,请通过 SSH 连接到 Raspberry Pi 并调用 sudo bluetooth.sh 然后重新启动 Pi。 然后按照控制器设置说明进行操作。
-
连接控制器后,请确保 joy_teleop 节点正在运行。 这些是作为turtlebot4_bringup 下的标准和Lite 启动文件的一部分启动的。 如果它没有运行,您可以通过调用手动运行它:
ros2 launch turtlebot4_bringup joy_teleop.launch.py-
joy_teleop 节点的默认配置仅适用于 TurtleBot 4 控制器和 PS4 控制器。
-
如果控制器上的按钮映射不同,您可能需要创建自己的配置文件。
-
要驱动机器人,请按住 L1 或 R1,然后移动左操纵杆。 默认情况下,L1 将以“/cmd_vel”速度驱动机器人,R1 将以“geometry_msgs/Twist ”速度驱动机器人。 可以在配置文件中更改按钮。
-
您可以通过命令行手动发布到该主题,方法是调用:
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist \
"linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"- 设置 linear.x 值以驱动机器人向前或向后,设置 angular.z 值向左或向右旋转。
Create® 3 Actions
- Create® 3 提供了一组用于驱动机器人的 ROS2 动作。
- 您可以使用 DriveDistance、DriveArc 和 RotateAngle 动作来准确告诉机器人行驶或旋转的距离和速度。
- 例如,命令机器人以 0.3 m/s 的速度向前行驶 0.5 m:
ros2 action send_goal /drive_distance irobot_create_msgs/action/DriveDistance \
"distance: 0.5
max_translation_speed: 0.3"纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流