



















create® 3入门教程-网络服务器应用
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

说明:
- 介绍如何使用create® 3的网络服务器应用
相关设备
- Turtlebot4机器人套件:采购地址
网络服务器应用
- 应用程序菜单通常有两个选项:“配置”和“重新启动应用程序”。当机器人充当接入点时,会出现第三个选项“重启机器人”
重启应用
-
点击“重启应用程序”将重启机器人的 ROS 2 应用程序。这将需要几秒钟才能完成。
-
修改 ROS 2 配置设置后需要重新启动应用程序。重启应用程序不会重启网络服务器;它们是单独的应用程序。
重启机器人
- 单击“重启机器人”将完全重启机器人。这将需要几分钟才能完成。
应用程序配置
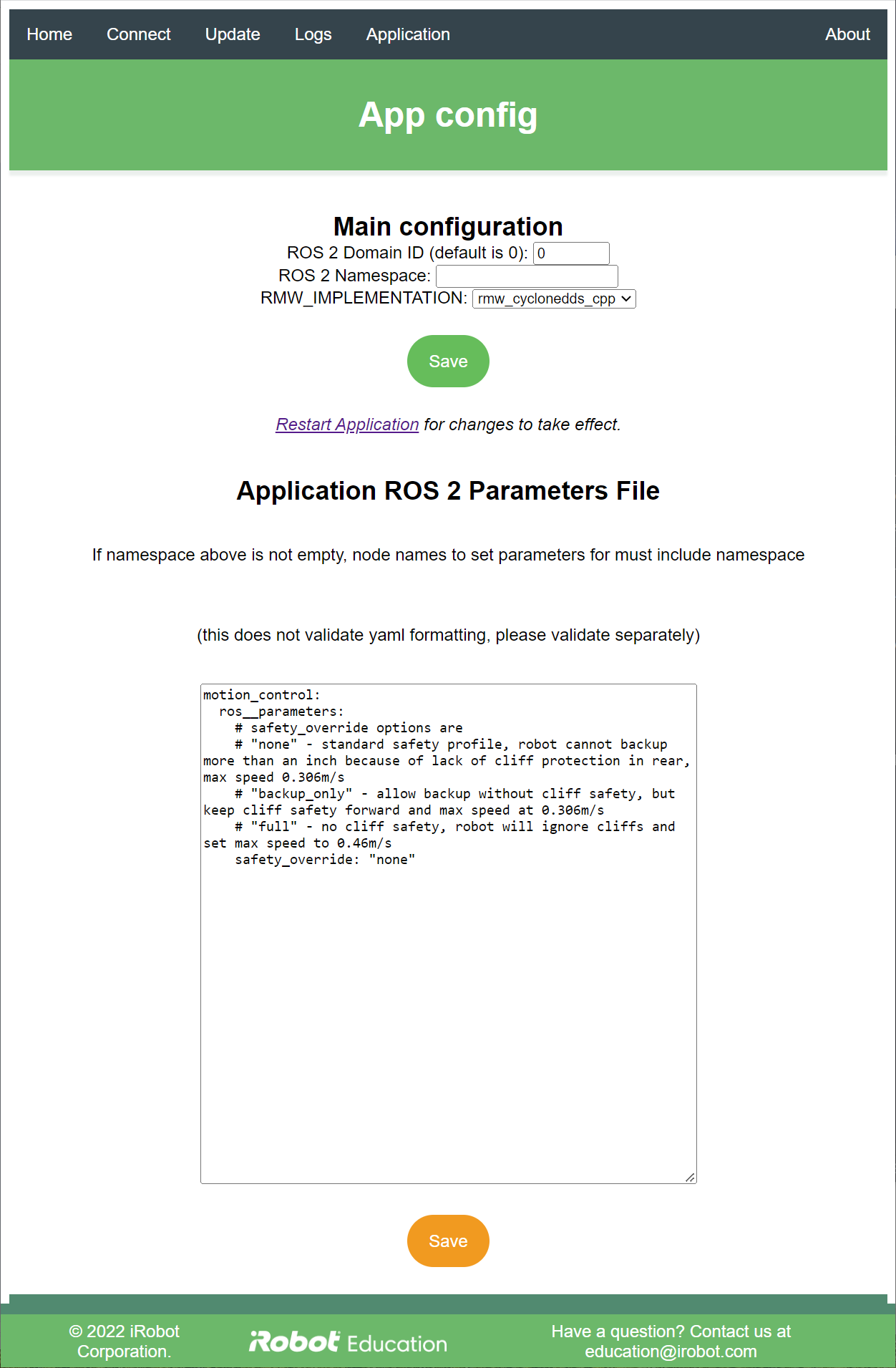
- 此页面上有两个配置部分。保存任一部分后,需要重新启动应用程序才能使更改生效。
主要配置
- 主要配置包括 ROS 2 域 ID、命名空间和 RMW 实现。有关这些设置的基本信息可以在此文档站点的ROS 2 网络配置和多机器人设置页面中找到
应用程序 ROS 2 参数文件
-
这是一个用于配置 ROS 2 参数的原始 yaml 文件。Web 服务器不会验证这个 yaml 文件;设置不正确可能会导致应用程序无法正常启动。这将在日志中找到详细信息。
-
如果发生这种情况,可以再次编辑参数文件并将其保存在 Web 服务器中以纠正问题
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流