



















ROS史话36篇.15 ROS之可视化rviz
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS可视化(visualization)工具是一个可视化的仿真环境,通常指的是rviz环境。在仿真环境中可以观察机器人的姿态,传感器的数据。rviz工具是ROS系统官方支持的3D可视化环境,下面是rviz的样子。
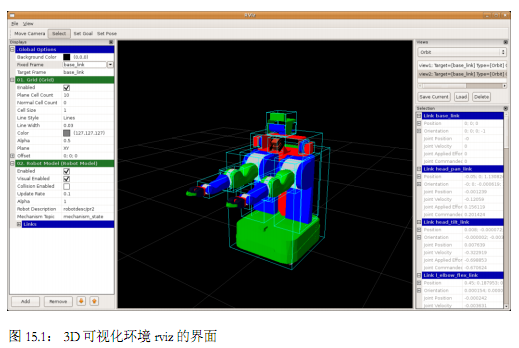
rviz界面的左侧的面板包含一系列的可视化插件及其属性。这些插件的主要用途是查看ROS消息,并以可视化的方式显示出来。可以是一些感器数据,如摄像头的图像,3D点云,激光雷达;也可以是机器人模型、变换tf等数据。
rviz工具条中有一些工具可以用来操纵3D视角。比如可以展示机器人模型的关系、调整机器人视角、设置导航目标,设置机器人2D位置估计等。
视图面板一般放置在rviz的右侧。通过使用视图面板,我们可以保存不同的3D视角,并通过加载保存的设置信息来切换不同的视角。如果在rviz中运行仿真的话,会使用时间面板。也可以通过这个面板初始化rviz设置。
rviz的三位作者是车库的软件工程师:戴夫·赫什博格(DaveHershberger),大卫·高索(David Gossow),乔西·浮士德(JoshFaust)。戴夫·赫什博格加入Kinema机器人公司,就是那家由MoveIt!的创始人,印度大叔萨钦·启德创建的基于视觉和机器学习的快速分拣机器人公司,号称世界上第一个将深度学习和3D视觉解决方案用于工业机器人搬运。
大卫·高索追随埃坦•马德-爱泼斯坦去了hiDOF,然后随着hiDOF被收购,加入Google Tango团队。中途,2014年大卫·高索还在VR最狂热的时候,创建了一家做3D视觉的公司Lucid。
乔西·浮士德跟随车库的创始人斯科特·哈森去了Suitable Robotics,然后加入了Magic Leap,随后回波兰老家创业去了。这时候的哈森携谷歌等投资大鳄,又成了如日中天的增强现实创业公司Magic Leap的股东。

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号