



















ROS史话36篇.25 ROS之皆大欢喜(Player 与 Stage)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
以前有专门为 ROS 定制的软件库如 PCL、Stage、Gazebo。H 版本里这一部分做了较大的变动,将依赖于这些专用的软件库,修改成了依赖于其相应标准软件库。
比如,一个软件包需要依赖 ROS版的 PCL,现在则改为依赖标准的 PCL即可。这样就不需要单独更新ROS版本的PCL。Stage和Gazebo情形也类似。
Player项目由布莱恩·格基、理查德·沃恩(Richard Vaughan)和安德鲁·霍华德一起发起的。布莱恩·格基和安德鲁·霍华德都有提及。
关于理查德·沃恩,如果大家关注今年在加拿大温哥华举办的 IROS机器人大会,2017年程序委员会主席就是这位英国大人理查德·沃恩。理查德·沃恩毕业于英国剑桥大学,获博士学位,后来到美国宜人的洛杉矶,南加州大学做博士后研究。
理查德·沃恩后来一直在加拿大西门菲莎大学(Simon Fraser University, SFU)做研究。
最早可以追溯到 1999 年南加州大学机器人实验室。在南加州大学,这几位一起开发了Player项目20,其中包括2个子项目:一个是Player,一个是Stage。
Player 是一个各种机器人设备的服务器,客户端可以利用计算机网络,通过 Player 控
制机器人设备和传感器。
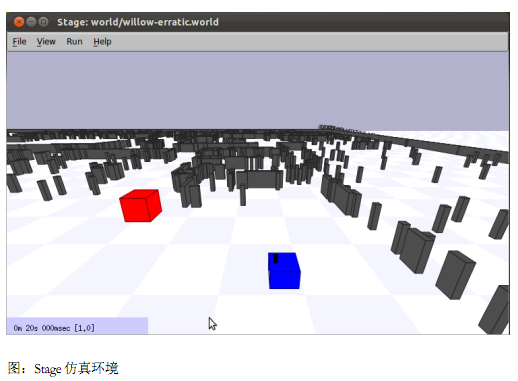
Stage是一个二维的机器人仿真环境。
2004 年左右,Gazebo,这样一个三维的基于物理的机器人仿真环境,加入到了 Player项目中。后来车库资助Gazebo的开发,Gazebo独立成一个单独的项目。
Player和Stage的名称来源于莎士比亚戏剧“皆大欢喜”舞台剧中的独白。Gazebo意思为舞台中带圆顶的露台。
“All the world's a stage, and all the men and women merely players. They have their exits and their entrances; and one man in his time plays many parts...” ——William Shakespeare, "As You Like It"
“世界是一个舞台,所有的男男女女不过是演员,他们都有下场的时候,也都有上场的时候。一个人的一生中扮演着好几个角色。” ——莎士比亚《皆大欢喜》
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号