



















ROS史话36篇.31 TurtleBot的演变
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TurtleBot非常受欢迎,全球卖出了上千台TurtleBot。这是两位创始人始料未及的。
究其原因是,所有好一点的机器人都太贵了,自己设计开发一款机器人也太贵了,太费时了。
TurtleBot 的目的是给机器人开发者提供一个价格适中的开发平台,让他们直接使用TurtleBot自带的软硬件,专注于 ROS和基于 ROS的机器人应用开发。
TurtleBot采用了市面上能买到的最便宜的设备,加以拼装。性能也能满足大多数人的要求。驱动、软件完整,说明文档简单明了。软硬件开源。
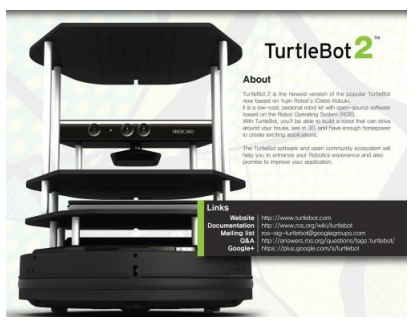
TurtleBot的硬件包括扫地机扩展的运动底盘 iRobot Create、RGB-D相机 Kinect、一个笔记本、电池和支撑架。在笔记本上安装 ROS 后,就可以实现 3D 导航、跟随等功能。
一切都符合市场需求,极客们的口味。

这是Turtlebo-1的故事。
Turtlebot-2 的出现由完全不同。韩国有家公司叫柳真机器人(Yujin Robotics)希望与车库合作,打造一款与 Turtlebot-1功能类似的机器人研究平台。车库当然乐见其成。车库这是把希望实现的功能发给了柳真机器人公司,很快一个全新的Turtlebot就制造出来了。这就Turtlebot-2。
Turtlebot-2 比 Turtlebo-1 易用性更好,更安静,还能自己充电。别忘了,iRobot Create就是基于 iRobot Roomba 的扫地机器人。柳真机器人公司也生产扫地机器人,打造一款类似的机器人平台并不算难事。
比较遗憾的是,有一个对机器人至关重要的传感器,“激光雷达”,在 Turtlebot-2没有配备。
还有一个美中不足的地方,Kinect 是固定的,安装在支架上,只能朝向一个方向,视野有限。所以你们会看到有的机器人安装了好几个 Kinect,面向不同的方向。也有把Kinect安装在一个舵机上,从而可以改变Kinect的朝向。
Turtlebot-2变种还有 Turtlebot-2e(单片机替换了笔记本电脑)、Turtlebot-2i(配备了一个3自由度的机械臂)、Turtlebot- Euclid(用了英特尔的相机、预装了英特尔的Euclid开发套件)。

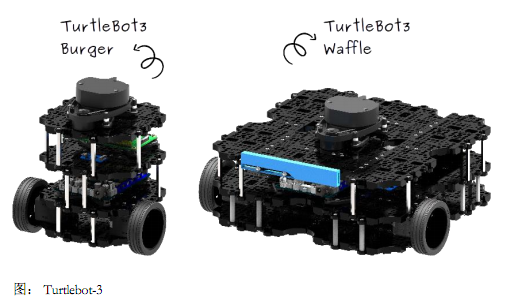
韩国另外一家公司 ROBOTIS 在多年后,开发了拼装版的 TurtleBot-3,还增加激光雷达,这是Turtlebot-3最重要的改进。
当然,Turtlebot-3的价格也非常便宜
便宜才符合TurtleBot的初衷——让更多的人能利用TurtleBot学习ROS。

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号