



















ROS史话36篇.28 TurtleBot的故事
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TurtleBot是一款移动机器人,特点是便宜。TurtleBot带有摄像头和移动底盘,可以用于研究机器人的导航问题:即机器人决定往哪个方向走,怎么走,怎么绕过障碍物,最终到达目的地。
不少 ROS 的初学者是在 TurtleBot 的陪伴下学习的机器人编程的。以至于一些人想方设法能获得一台TurtleBot,好像没有TurtleBot,就没法学习ROS,没法学机器人编程了。
随着 ROS的普及,也让一些人看到商机,一些代理就通过销售 TurtleBot 发了点小财。也有一些机器人爱好者,通过打造与 TurtleBot 功能类似的机器人,在经济上小有收货。ROS的官方说法,TurtleBot总共卖出了上千台。让我们跟随TurtleBot的故事,探究其中的奥秘。
第一台TurtleBot
一开始,人们一直有种错觉:为了能使用ROS,就必须有一台PR2机器人。因为PR2非常昂贵,人们自然也会推理,认为ROS是一个很难用的系统。
当时ROS刚刚推出, 车库的两位工程师,图利·弗特(Tully Foote)23 和麦罗尼·威瑟(Melonee Wise)24认为,这也太不现实了。怎么能期待一般的开发者拥有这么昂贵的机器人才能用ROS进行机器人开发呢?
开发者的这种错觉非常不利于ROS的普及。
“如何让大学的老师、学生、机器人爱好者拥有一个价格上能够接受的硬件平台,方便学习ROS”,这样的问题开始在图利· 弗特和麦罗尼· 威瑟脑海中不停盘旋。
车库做了非常多的尝试,希望 ROS能在其他一些机器人上跑起来。图利· 弗特办公室有一台乐高玩具机器人,他们曾经尝试在这样的玩具上跑 ROS,但是不是非常成功。
能做的似乎只能让电机转动,无法实现机器人常见的导航,毕竟这样的玩具机器人运算能力不足。

2010 年年底,墙角的一台扫地机器人引起麦罗尼· 威瑟的注意。这是一款 iRobot 机器人25,他们马上了解到,当时 iRobot 机器人公司还有一款专门为开发者设计的机器人,iRobot Create。利用机器人本身提供的API,可以对iRobot Create进行编程。
当时微软的 Kinect相机刚推出,很火。Kinect可以获得场景的深度信息,这与我们常见的获取颜色信息的相机不同,这款相机的图像是深度,也就是拍摄到信息是物体到相机的距离。
这款设备本来是为家庭游戏打造的体感设备,可以一经推出,马上就吸引了机器人和计算机视觉研究者的注意,把它作为一个经济实惠的图像获取设备来利用。
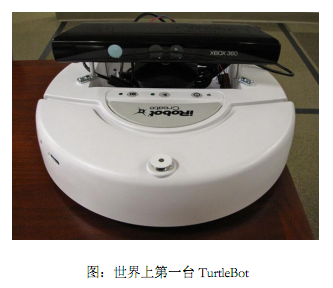
图利·弗特 和麦罗尼· 威瑟把 Kinect 固定在 iRobot Create 上,这样就有了深度相机Kinect,有了移动平台iRobot Create,一款可移动、可用视觉进行导航的机器人就有了,而且还非常便宜。
“便宜”正式图利·弗特和麦罗尼· 威瑟是想要的,只有便宜才能让更多的人用得起。世界上第一台TutleBot见图3.1。
可这仅仅是硬件,用市场上可以买到的设备,拼装在一起。最让图利·弗特和麦罗尼· 威瑟头痛的是设备驱动部分。
如何打开硬件提供的端口,建立连接;如何将相机获取的数据,并进行特定的数据格式进行解析;如何把这些封装在一起,给最终提供给ROS的开发者的是一个简单的接口。
有了移动平台,有了摄像头,还需要一个计算机来运行 ROS 的相关算法。自助导航是 ROS 的精髓,为了把这个精髓表现的淋漓精致,这个平台必须能实现自主导航。
要便宜,还要功能强大。图利·弗特和麦罗尼· 威瑟测试了不同的电脑,希望找到一款性价比最高的计算平台。当然,后面的故事大家都知道了,他们选择了华硕的一款上网本,性价比极高。
虽然他们又解决了iRobot Create的内置里程计准确度不高的问题,解决了Kinect的供电问题。
Google一次购买了8台这样的原型机,用于内部研究项目。
两人又花了点时间,做产品的设计。TurtleBot 的图标就是一个海龟背上有 ROS 图标中的9个圆点。很快对外发布了。
就这样,Turtlebot火了。
笔者所在的实验室最开始也是利用Turtlebot做研究的。考虑到成本,笔者从美国采购了iRobot Create,学生们自己DIY了其他支持部件。深度相机用的是华硕的Xtion Pro Live。
Turtle是海龟的意思,Bot是机器人的缩写。TurtleBot字面上讲,就是“海龟机器人”的意思。为什么叫乌龟机器人,而不是螃蟹机器人,蟑螂机器人,金鱼机器人?
让我们慢慢解释。
有这么一位,叫威廉姆·格雷·瓦尔特(William Grey Walter),1910 年出生于美国26,幼年由于父母的缘故,来到英语求学。后来成为一名神经科学家。一生多数时间在美国做研究。
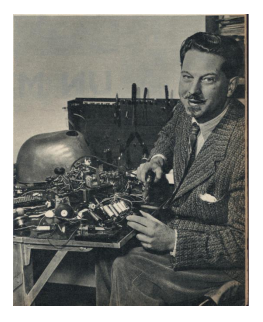
为了研究大脑和神经反应,1948 至 1949 年间,威廉姆·格雷·瓦尔特特制作了一个被自己称为“机器冒险者(拉丁语为Machina Speculatrix)”的机械装置。希望通过让机器装置来模仿,研究神经反应和人类的行为。
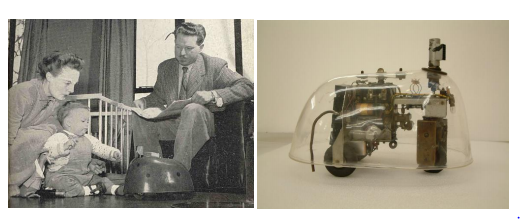
“机器冒险者”采用了三轮结构,一个转向轮,两个驱动轮。前面的转向轮用于控制方向,两个后轮用来驱动整个机构。
威廉姆·格雷·瓦尔特在这个三轮“机器冒险者”的上面遮盖了一个外壳,看起来非常可爱,像一只大乌龟。人们称其为威廉姆·格雷·瓦尔特的“乌龟”,这只“乌龟”是人类历史上第一个自主移动的机器人。
威廉姆·格雷·瓦尔特的“乌龟机器人”对机器人学、人工智能产生重大影响。很多人在威廉姆·格雷·瓦尔特的“乌龟机器人”影响中成长起来。
其中,1956年有一位大学生伊万·苏泽兰(Ivan Sutherland)给威廉姆·格雷·瓦尔特写了一封信,信中伊万·苏泽兰虚心地向廉姆·格雷·瓦尔特请教、征求意见。
这位伊万·苏泽兰就是后来的 ACM 图灵奖获得者,图形用户界面(Graphical User Interface ,简称GUI)的发明者, SketchPad的发明者,以及 “虚拟现实之父”。
乌龟(Turtle)在机器人领域基本成了机器人的代名词了。有 TurtleBot 这样的名字,也就不足为奇了。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号