



















ROS2入门教程-rqt_console简介

ROS2入门教程-rqt_console简介
说明:
- 介绍ros2 rqt_console日志查看工具
概念:
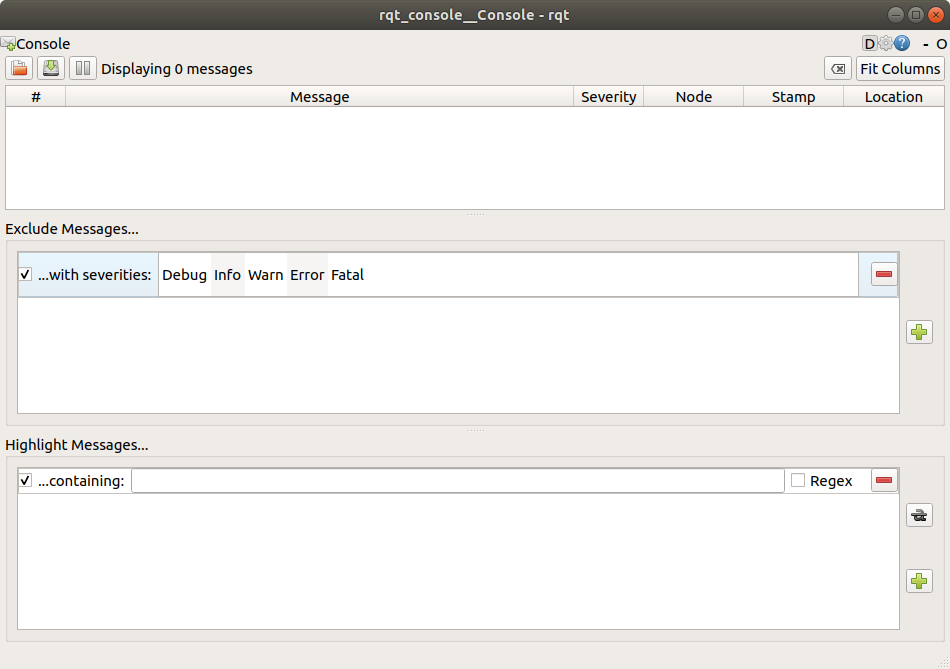
- rqt_console是一个GUI工具,用于自检ROS 2中的日志消息。
- 通常,日志消息显示在终端中。
- 使用rqt_console,您可以随着时间的推移收集这些消息,以更有条理的方式仔细查看它们,过滤它们,保存它们,甚至重新加载保存的文件以在不同的时间进行内部检查。
- 节点使用日志以各种方式输出有关事件和状态的消息。
- 为了用户的利益,它们的内容通常是信息性的。
- 日志消息的意图由节点的作者定义,尽管内容可以在运行时编写。
运行:
- 执行命令:
ros2 run rqt_console rqt_console- 效果:
- 运行turtlesim
ros2 run turtlesim turtlesim_node- 发布话题
ros2 topic pub -r 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}"- 查看日志
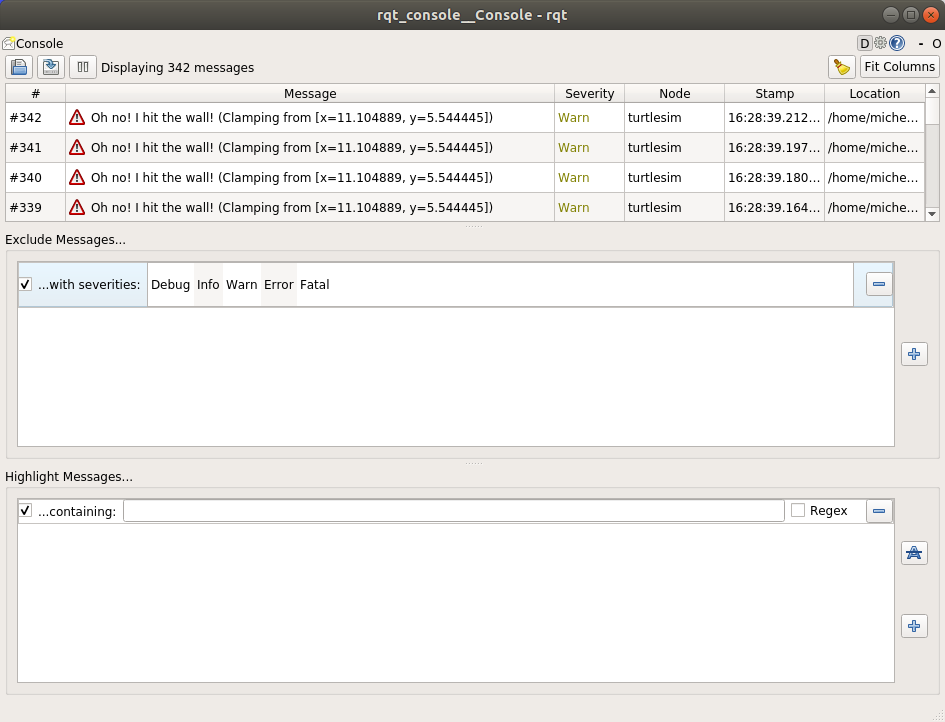
ros2 的日志级别:
- 日志级别:
Fatal消息指示系统将终止以尝试保护自身免受损害。
Error消息表示重大问题,不一定会损坏系统,但会阻止系统正常运行。
Warn消息表示意料之外的活动或不理想的结果,可能表示更深层次的问题,但不会直接损害功能。
Info消息指示事件和状态更新,以可视方式验证系统是否按预期运行。
Debug消息详细说明了系统执行的整个分步过程。- 更改默认显示的日志级别:
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN