ROS2入门教程-使用Eclipse构建ROS2包

说明:
- 介绍如何使用 Eclipse构建ROS2包
步骤:
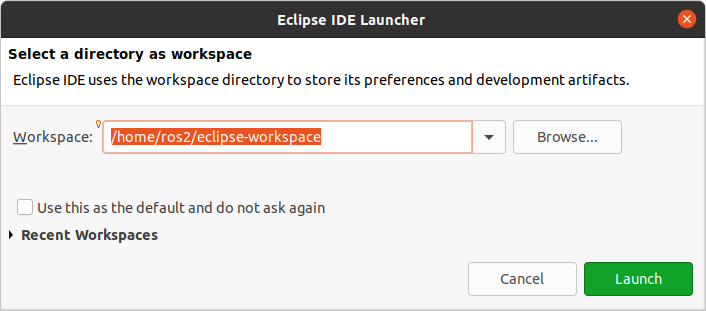
- 启动 eclipse 并选择一个 eclipse-workspace
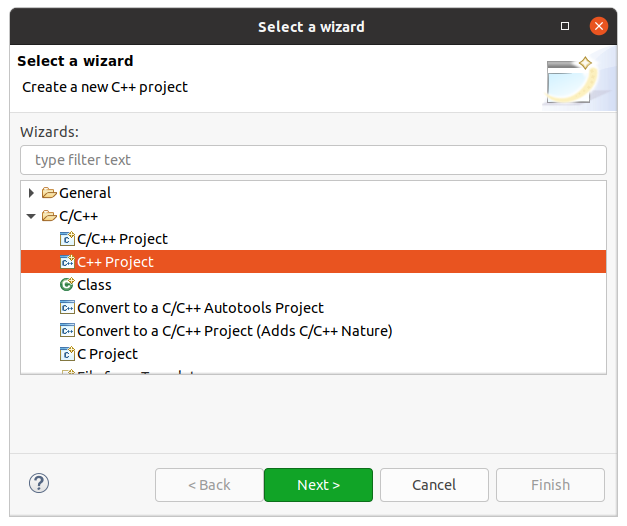
- 创建一个 C++ 项目
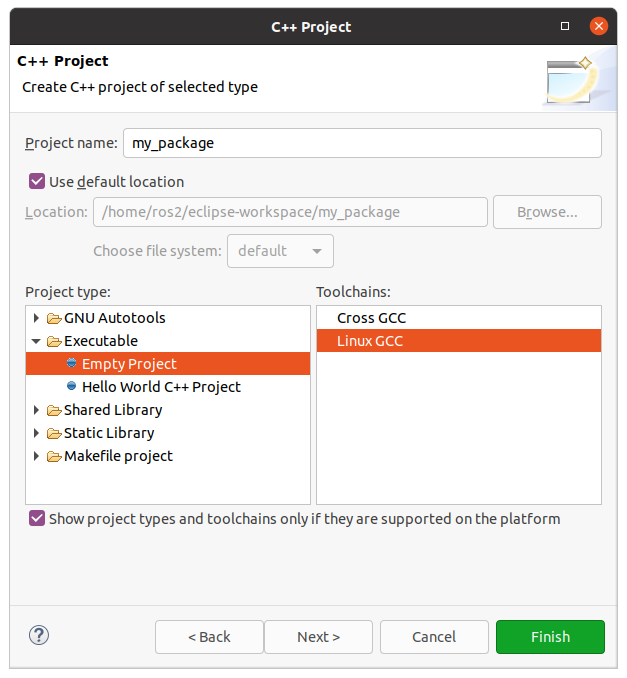
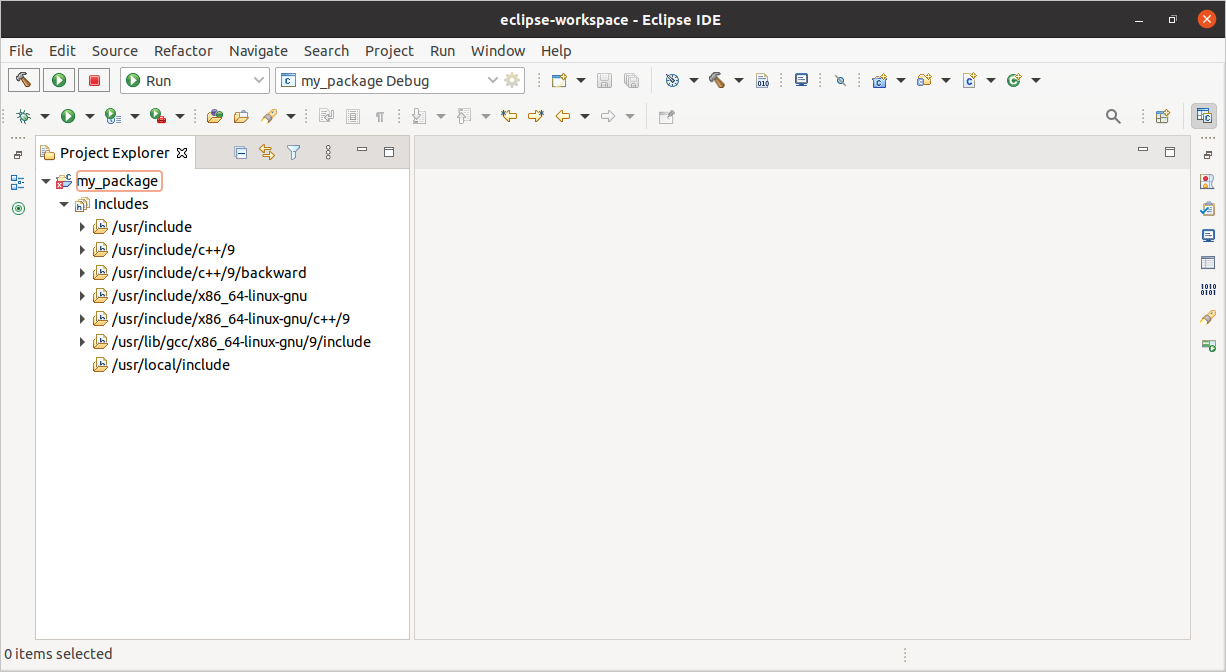
- 看到得到了 C++ 包含
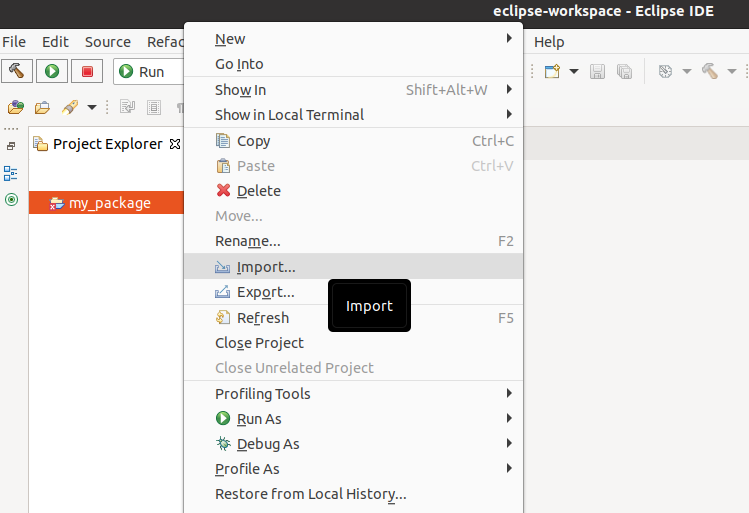
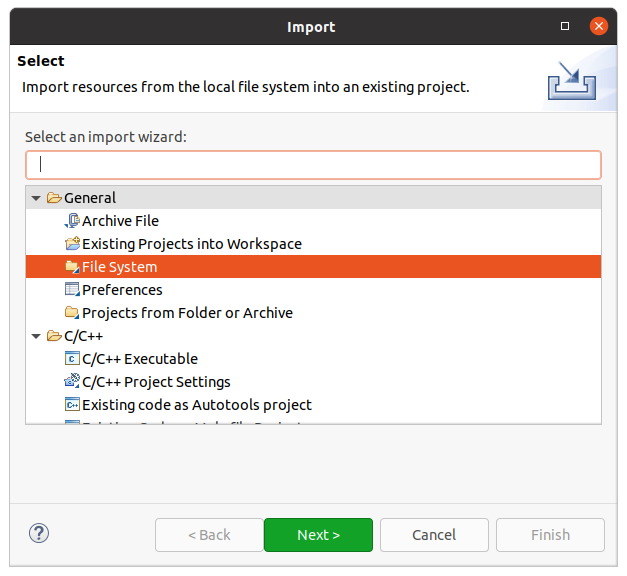
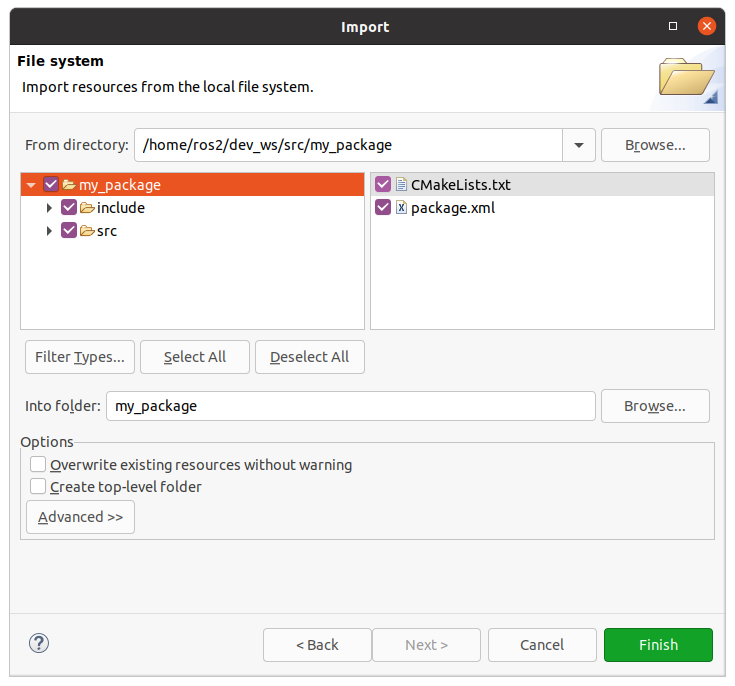
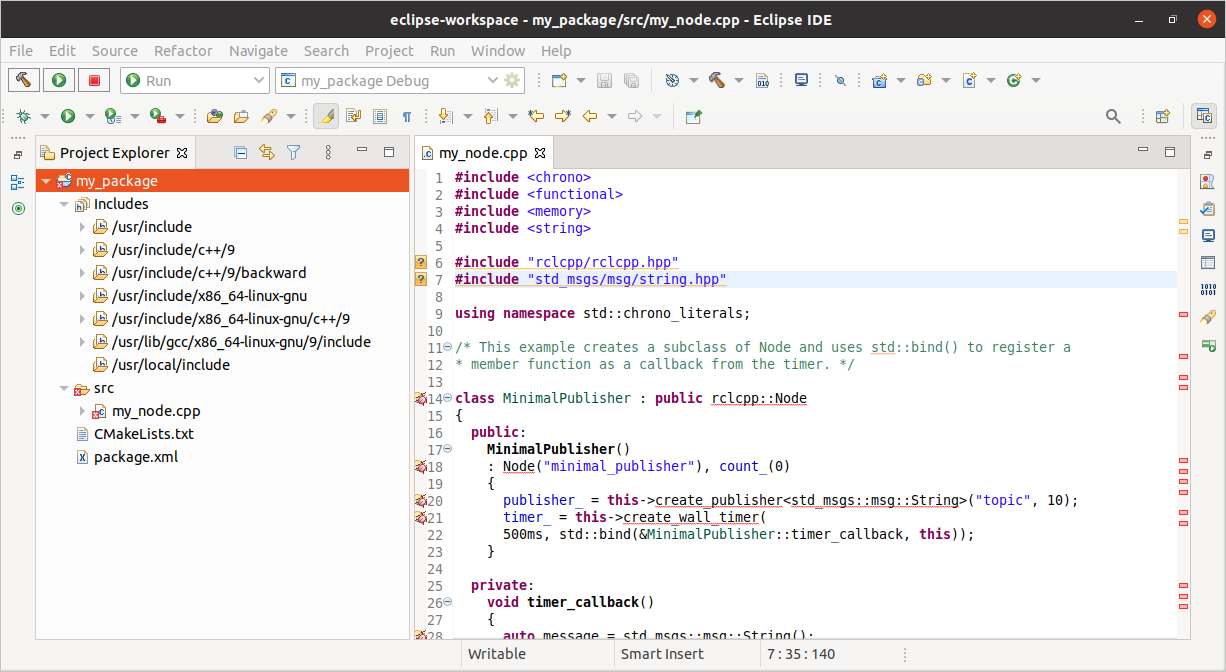
- 导入我们的 ROS 2 项目。代码仍然在旧的地方
- 在源代码中看到 C++ 包含的内容得到了解析,但 ROS 2 中的内容没有得到解析
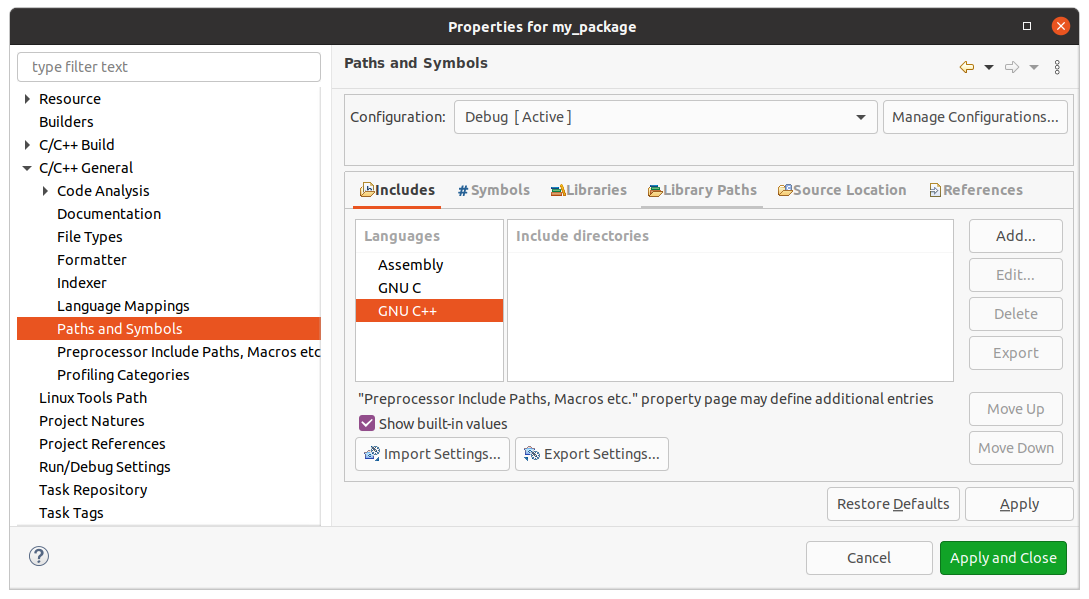
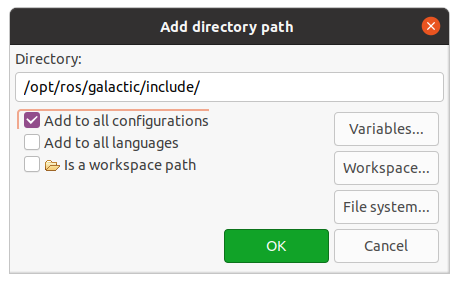
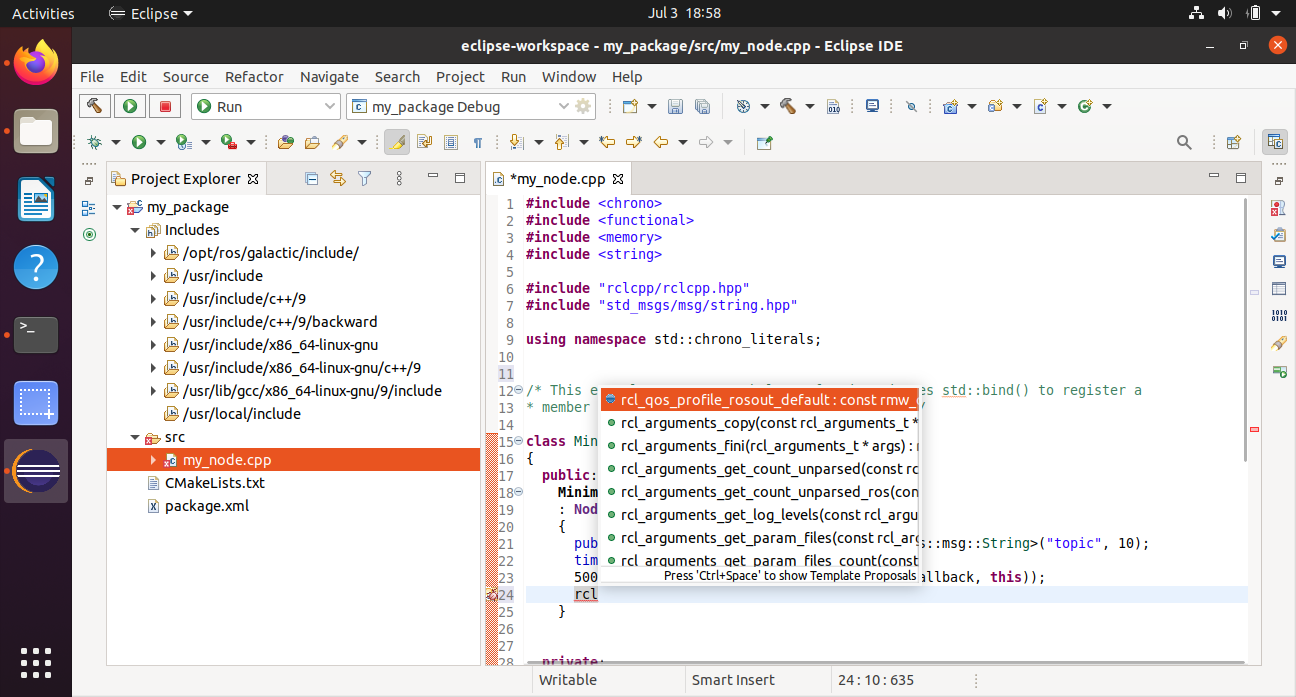
- ROS 2 包含也得到了解决
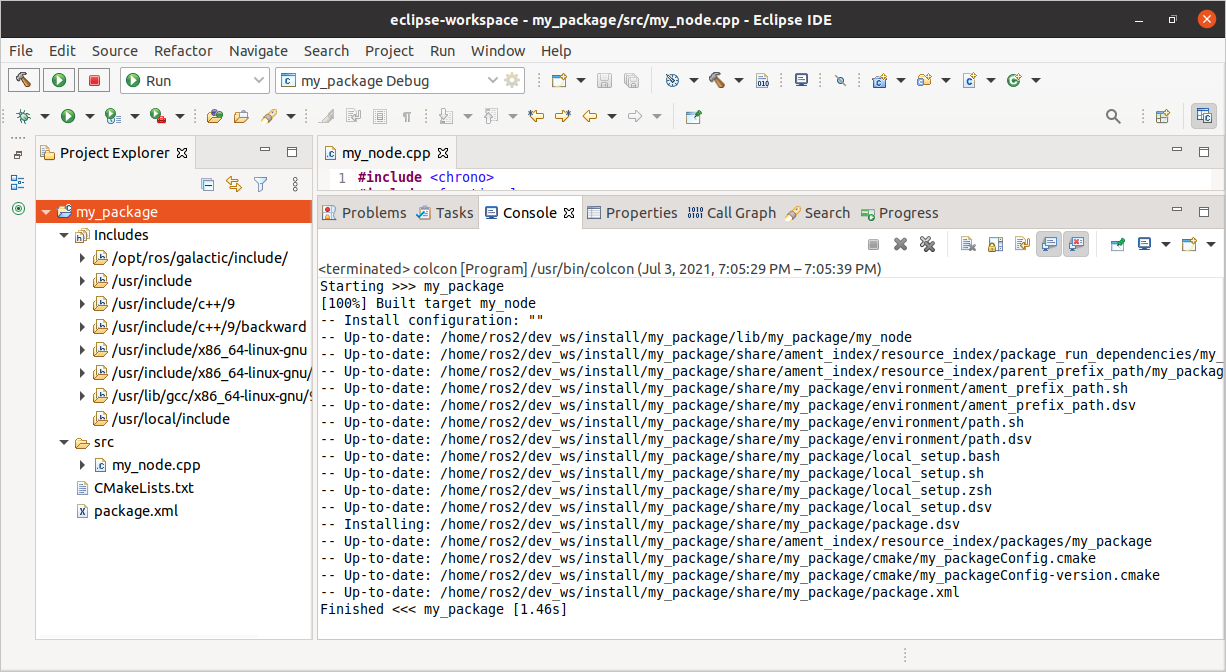
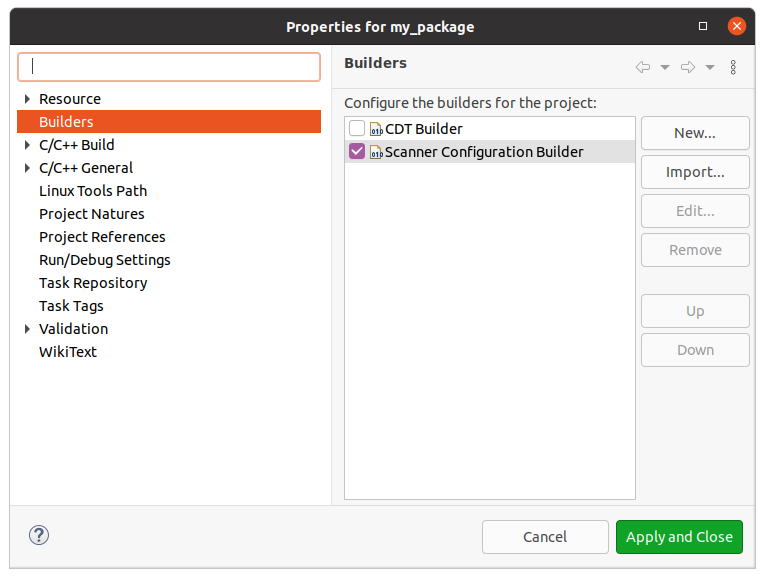
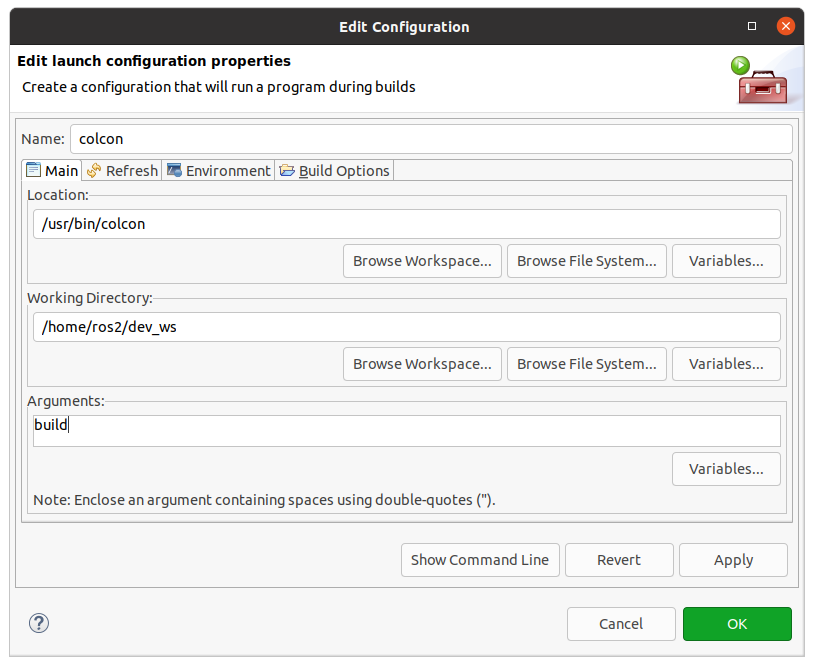
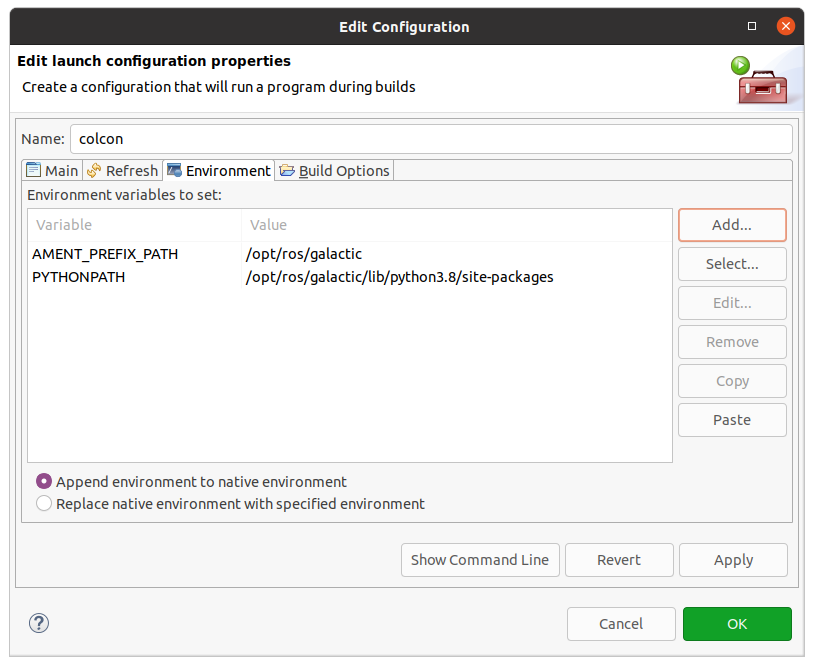
- 添加Builder colcon,以便我们可以通过右键单击项目和“构建项目”来构建
- 使用 PYTHONPATH,您还可以构建 Python 项目
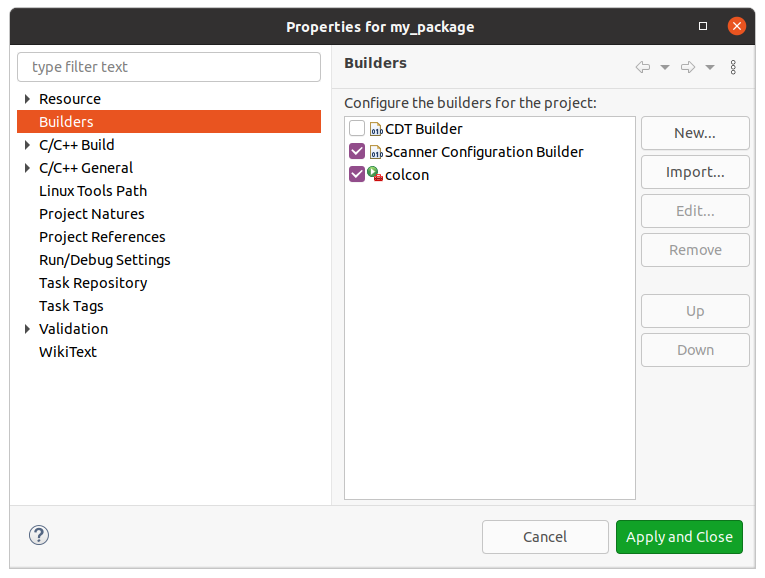
- 右键单击项目并选择“构建项目”