



















ROS2与Open-RMF仿真教程-Campus World/校园世界(22.09版)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS2与Open-RMF仿真教程-Campus World/校园世界(22.09版)
说明:
- 介绍Campus World/校园世界的演示场景
- 场景:ubuntu22.04 + humble + rmf22.09
Campus World/校园世界
- 这是一个规模更大的“校园”世界。
- 在这个世界上,有多个送货机器人在运作。
- 使用 GPS WGS84 坐标设计了世界,并在行星尺度上对交通车道进行了注释。
- 每个机器人还在 WGS84 坐标中传输其位置,由其车队适配器处理。
- 该演示旨在在大比例尺地图上展示 Open-RMF 的潜力。
演示:
- 启动仿真
ros2 launch rmf_demos_gz campus.launch.xml server_uri:="ws://localhost:7878"- gazebo效果图:

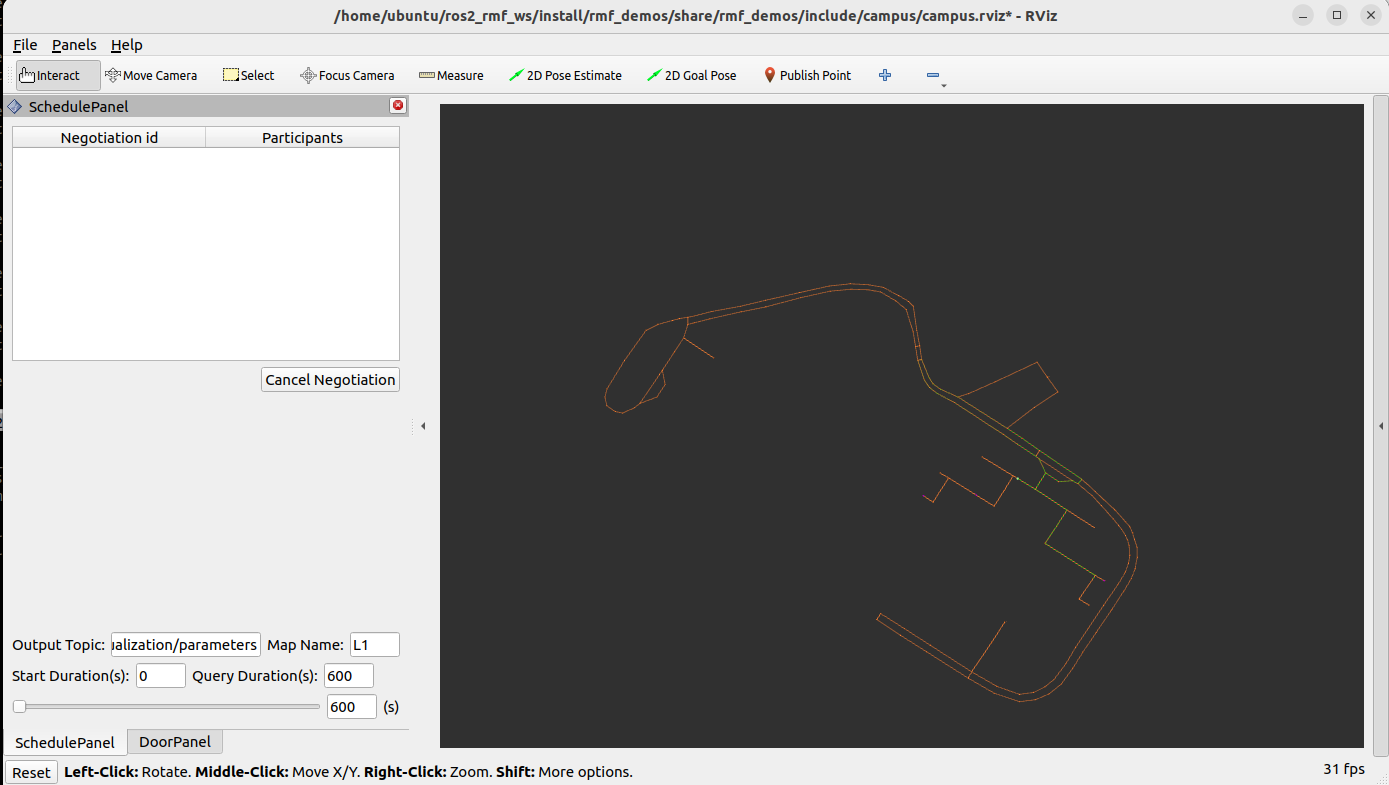
- rviz效果图:
命令行执行任务
- loop任务
ros2 run rmf_demos_tasks dispatch_loop -p room_5 campus_4 -n 10 --use_sim_time
ros2 run rmf_demos_tasks dispatch_loop -p campus_5 room_3 -n 10 --use_sim_time
ros2 run rmf_demos_tasks dispatch_loop -p room_2 dead_end -n 10 --use_sim_timeRobotManager整合
- fleet_robotmanager_mqtt_bridge 可用于将机器人位置、电池百分比和状态发布到 /robot/status/ROBOT-ID websocket 端点。
- RobotManager 的实例可以配置为订阅此服务器以接收 json 消息,这反过来将可视化 RobotManager 上的机器人。
- 安装mosquitto
# Install the prerequisites
sudo apt install mosquitto mosquitto-clients- 运行bridge
# Start the bridge
ros2 run rmf_demos_bridges fleet_robotmanager_mqtt_bridge -y 31500 -x 22000- 显示第一个机器人的 json 消息
mosquitto_sub -t /robot/status/00000000-0000-0000-0000-000000000001纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号