



















PythonRobotics机器人算法库-圆形拟合
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何实现圆形拟合
步骤:
-
进入目录PythonRobotics/Mapping/circle_fitting
-
执行文件
python3 circle_fitting.py-
蓝色圆圈是真实的物体形状。
-
红色十字是测距传感器的观测值。
-
红色圆圈是使用圆拟合估计的物体形状。
-
结果如下
Error: -0.0074871305699939494
Error: -0.00586361275647862
Error: -0.02235696000999532
Error: -0.00796043374425115
Error: -0.009389173511949012
Error: -0.011706930559437723
Error: -0.03718590856986925
Error: -0.020635093532925586
Error: -0.004220640420183219
Error: -0.010891182009710731
Error: -0.10804996767629027
Error: -0.0003112660275526036
Error: -0.0006204713557629304
Error: -0.0019208488182429484
Error: -2.9423505467862654e-05
Error: -0.0002257068416209318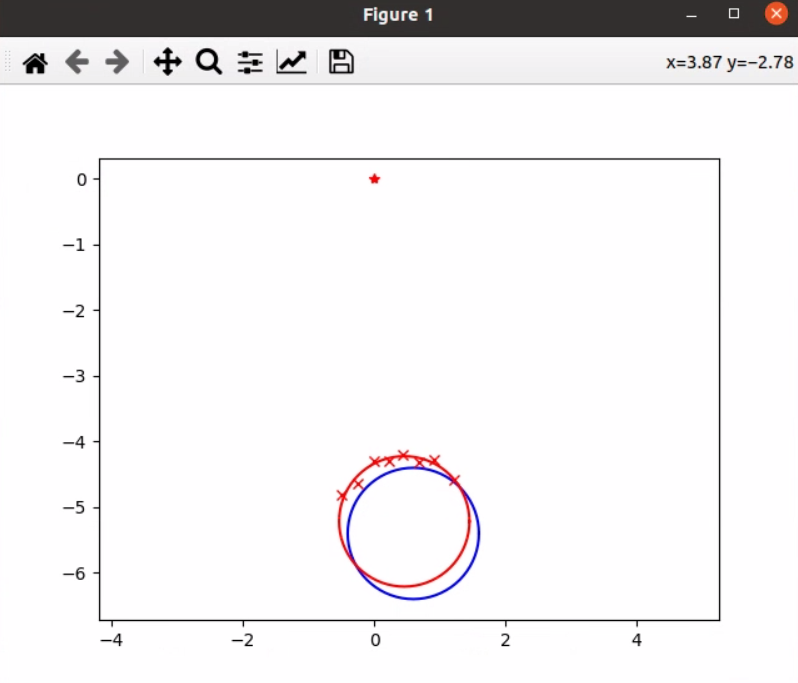
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号