



















PythonRobotics机器人算法库-倒立摆控制
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何倒立摆控制
步骤:
-
小车上的倒立摆由质量块组成m在一根长度的杆的顶部l如旁边所示,在水平移动的底座上旋转
-
控制系统的目的是通过向连接摆锤的小车施加力来平衡倒立摆锤
模型
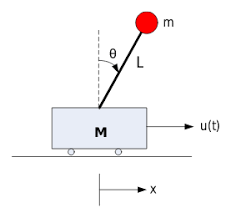
M:购物车的质量 m:杆顶部的负载质量 l:杆的长度 u: 作用在小车上的力 x: 购物车位置坐标 θ:与垂直方向的摆角
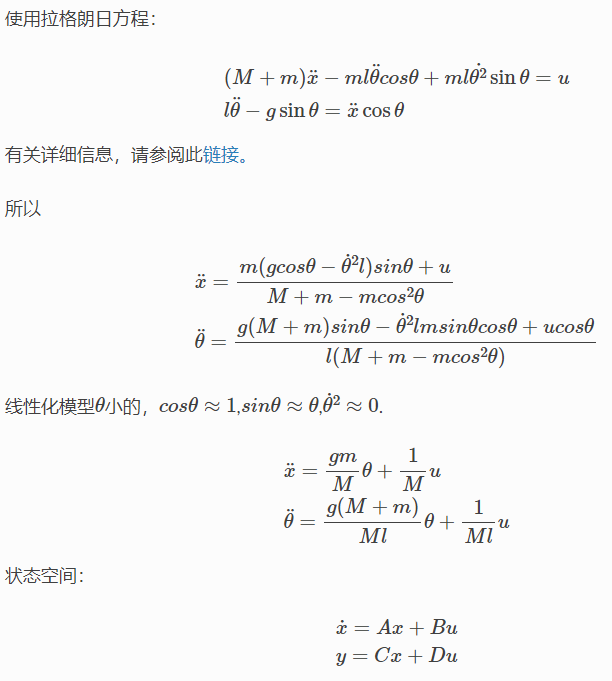
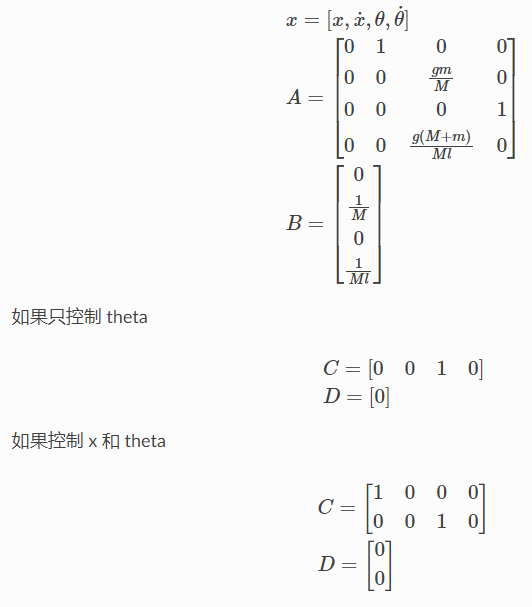
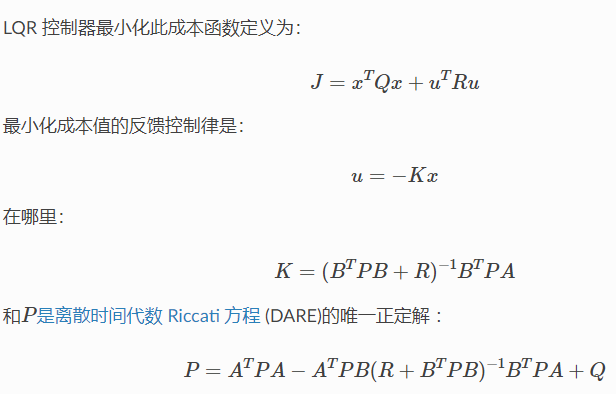
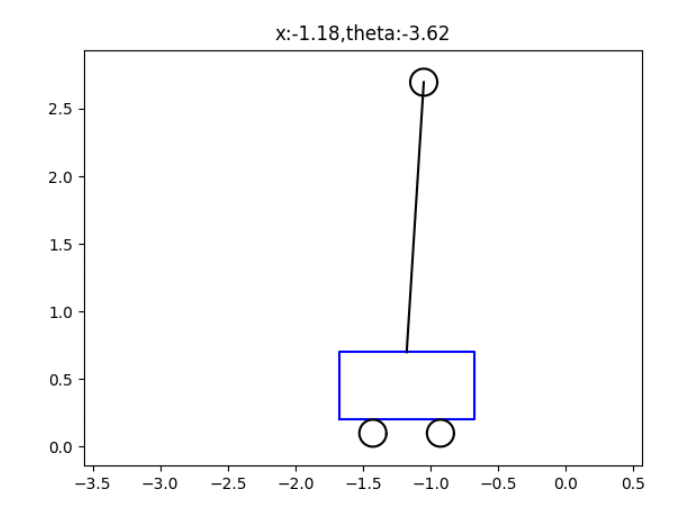
LQR控制
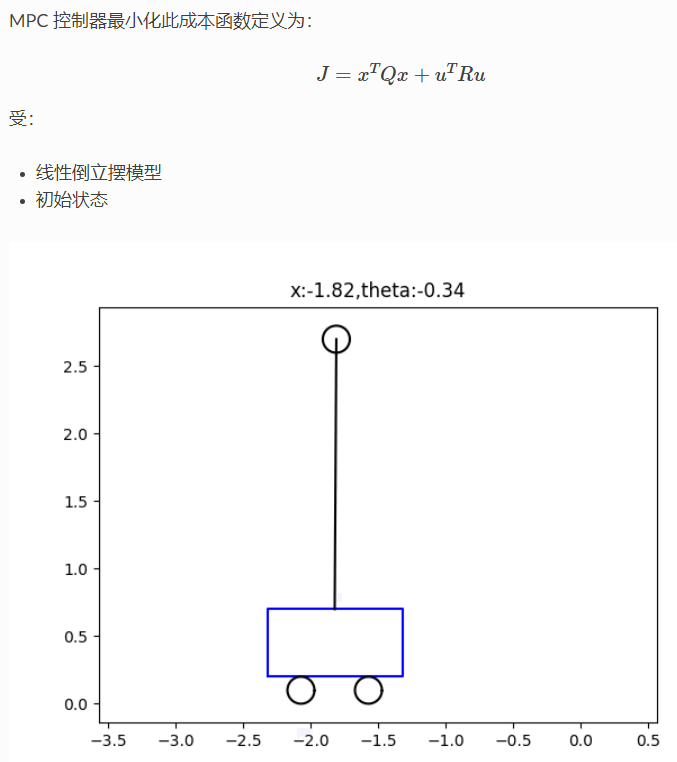
MPC控制
-
进入目录PythonRobotics/Control/inverted_pendulum
-
执行文件
python3 inverted_pendulum_lqr_control.py
python3 inverted_pendulum_mpc_control.py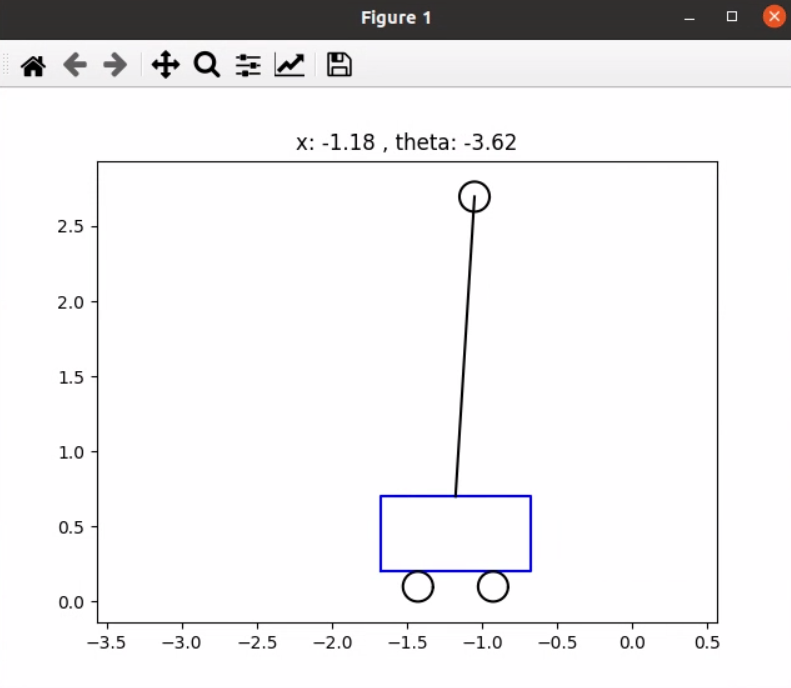
- 结果如下:
calc time:0.074798 [sec]
calc time:0.079020 [sec]
calc time:0.071127 [sec]
calc time:0.072449 [sec]
calc time:0.070014 [sec]
calc time:0.096413 [sec]
calc time:0.077080 [sec]
calc time:0.070803 [sec]
calc time:0.069509 [sec]
calc time:0.074037 [sec]
calc time:0.074032 [sec]
calc time:0.069972 [sec]
calc time:0.070727 [sec]
calc time:0.070657 [sec]
calc time:0.100196 [sec]
calc time:0.073944 [sec]
calc time:0.070494 [sec]
calc time:0.074903 [sec]
calc time:0.069723 [sec]
calc time:0.106297 [sec]
calc time:0.072978 [sec]
calc time:0.073794 [sec]
calc time:0.075836 [sec]
calc time:0.068974 [sec]
calc time:0.075633 [sec]
calc time:0.071358 [sec]
calc time:0.069283 [sec]
calc time:0.071636 [sec]
calc time:0.100222 [sec]
calc time:0.067865 [sec]
calc time:0.069376 [sec]
calc time:0.072994 [sec]
calc time:0.068123 [sec]
calc time:0.070868 [sec]
calc time:0.068594 [sec]
calc time:0.067688 [sec]
calc time:0.073450 [sec]
calc time:0.101252 [sec]
calc time:0.068972 [sec]
calc time:0.071774 [sec]
calc time:0.073246 [sec]
calc time:0.068583 [sec]
calc time:0.103493 [sec]
calc time:0.069759 [sec]
calc time:0.070850 [sec]
calc time:0.072444 [sec]
calc time:0.073969 [sec]
calc time:0.071262 [sec]
calc time:0.078928 [sec]
calc time:0.069212 [sec]
calc time:0.071355 [sec]纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号