



















PythonRobotics机器人算法库-纯跟踪算法
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何实现路径跟踪模拟与纯追踪转向控制和 PID 速度控制
步骤:
-
进入目录PythonRobotics/PathTracking/pure_pursuit
-
执行文件
python3 pure_pursuit.py-
红线是目标航向,绿叉表示纯追击控制的目标点,蓝线是跟踪
-
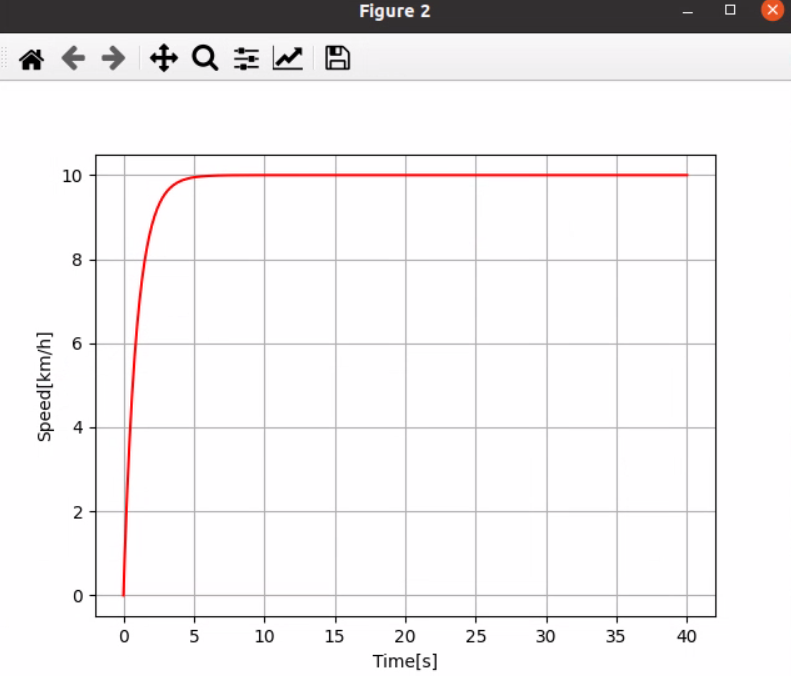
结果如下
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号