



















PythonRobotics机器人算法库-五次多项式曲线
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何使用五次多项式的运动规划
-
可以根据五次多项式计算二维路径、速度和加速度曲线
步骤:
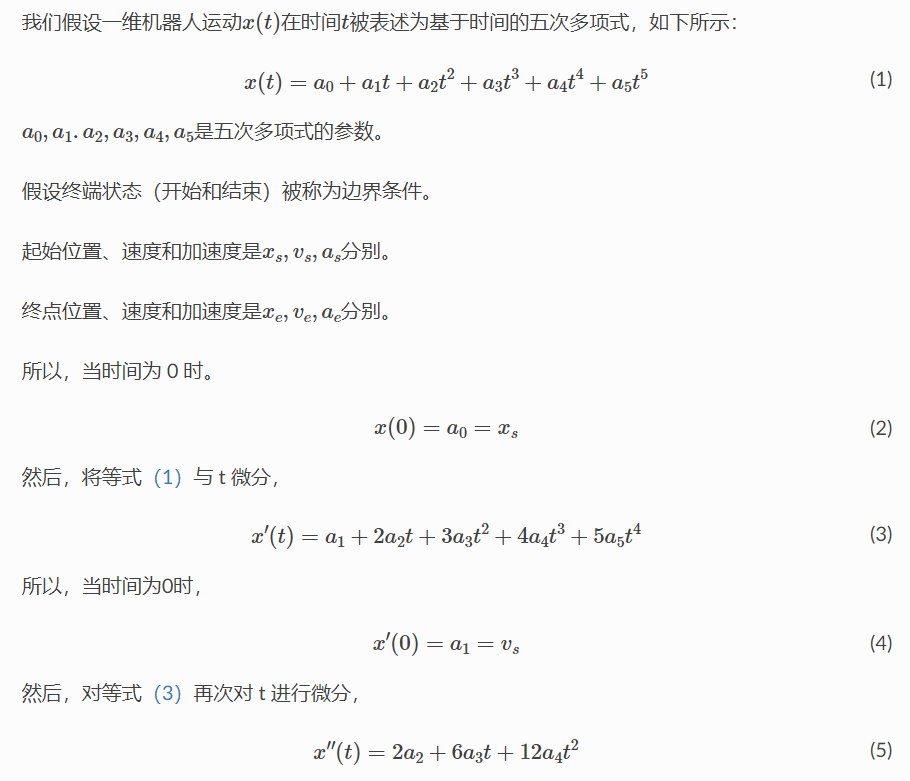
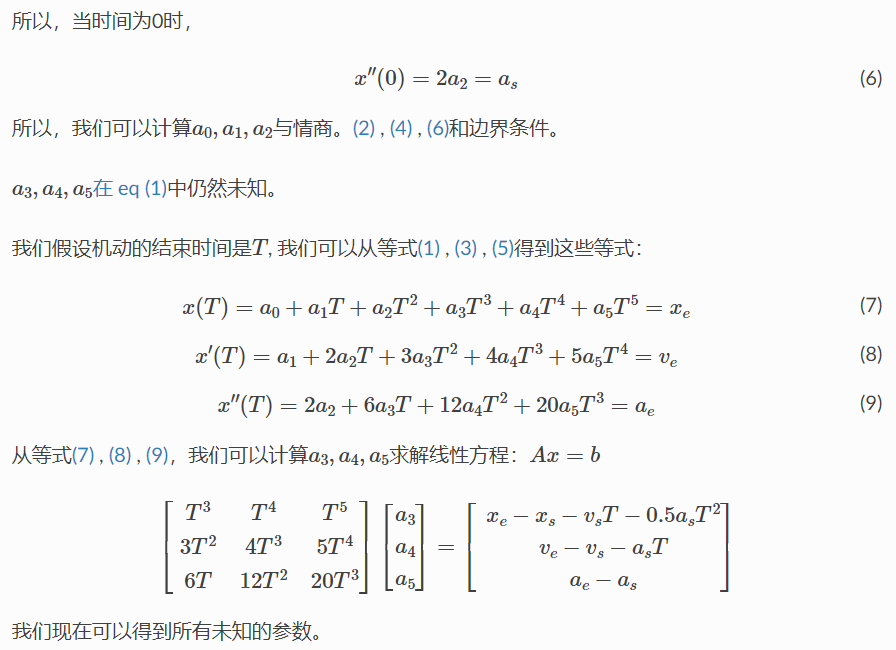
一维机器人运动的五次多项式
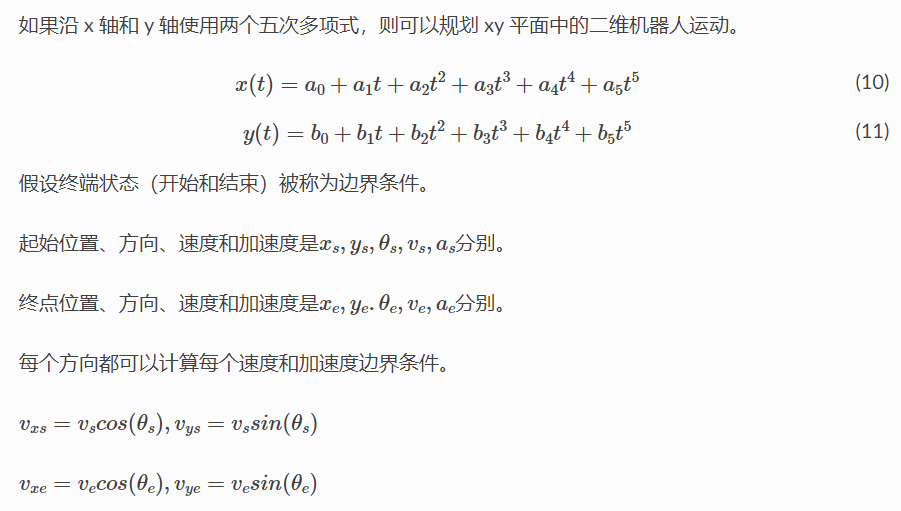
二维机器人运动 (xy) 的五次多项式
-
进入目录PythonRobotics/PathPlanning/QuinticPolynomialsPlanner
-
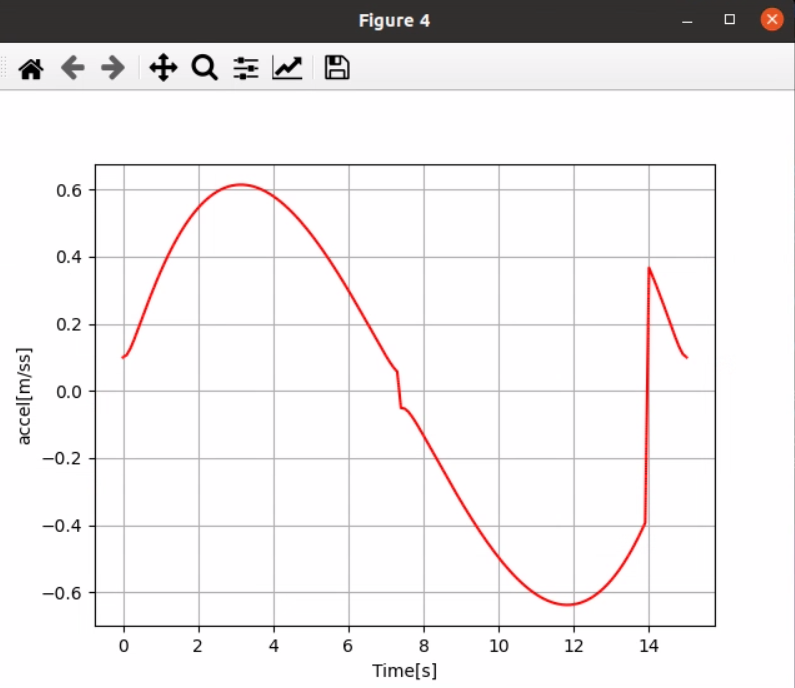
执行文件
python3 quintic_polynomials_planner.py- 结果如下
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号