



















ROS命令管理器-部署-快速搭建ROS2环境(桌面版)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS命令管理器-部署-快速搭建ROS2环境
说明:
- 介绍如何利用RCM快速搭建ROS2环境
- ROS2版本:galactic
步骤:
- 第一步:优化系统APT源
- 打开commands,点击common目录,导入update_system_mirros.json
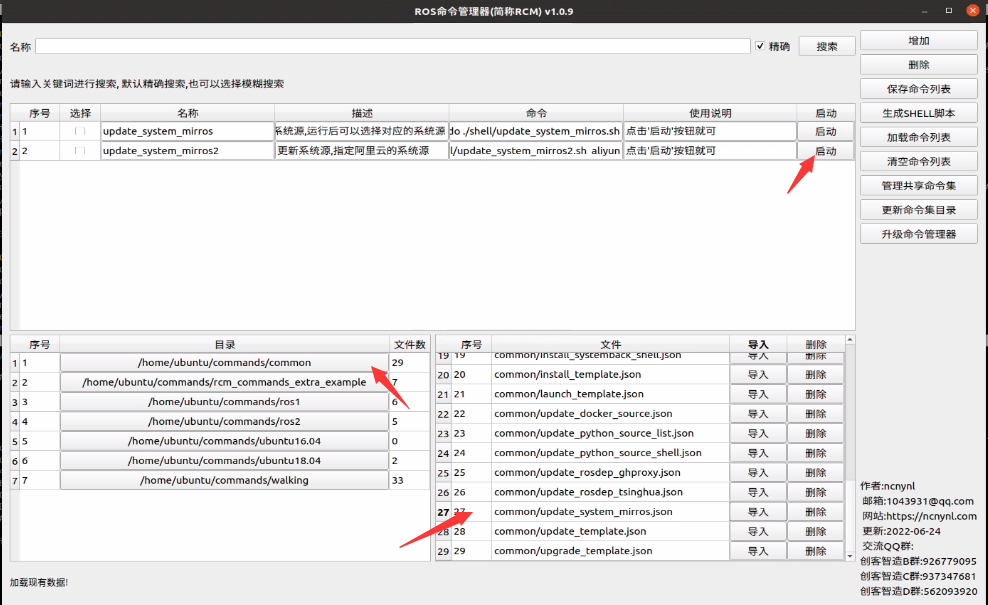
-
点击其中一条执行命令后的启动,完成APT源更新
-
第二步:安装ROS2
-
打开commands,点击ros2目录,导入install_ros2_galactic.json
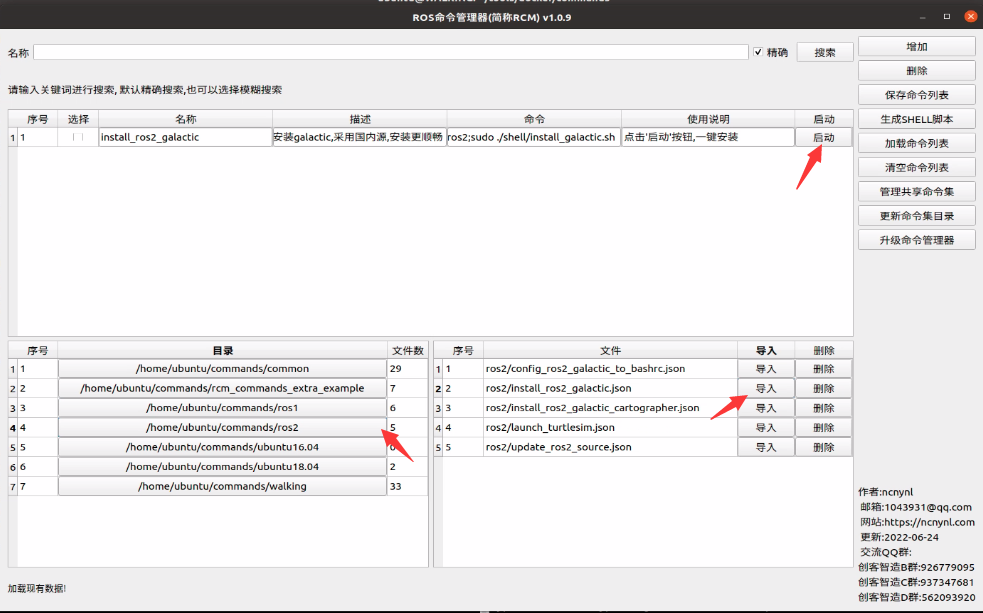
-
点击
启动之后,自动完成安装 -
第三步:启动测试小乌龟
-
打开commands,点击ros2目录,导入ros2/launch_turtlesim.json
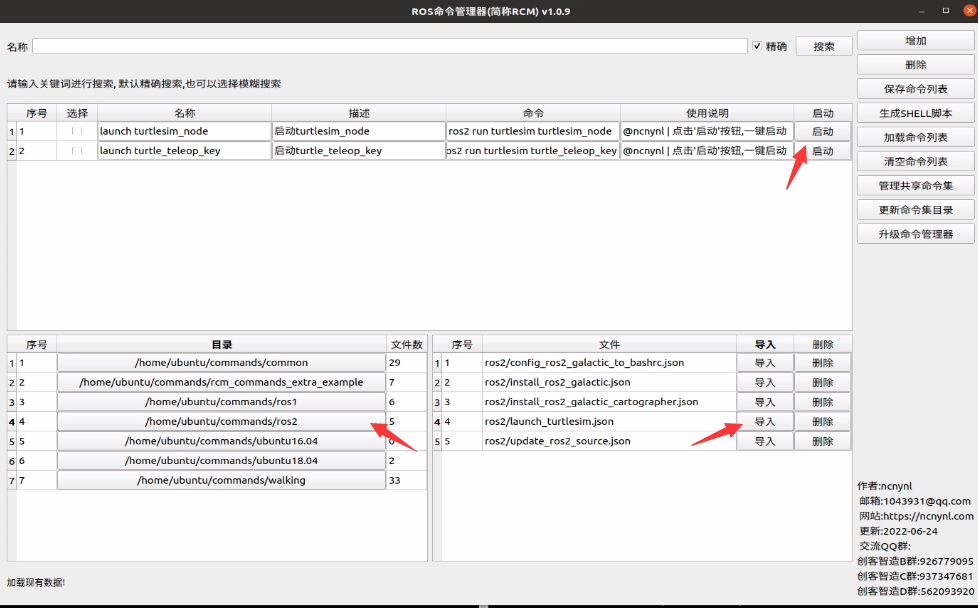
- 点击每行命令后的
启动按钮,启动每个程序,通过键盘方向键即可控制小乌龟 - 都正常运行后,ROS2环境搭建完成
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号